


































Komplett PPK-arbetsflöde för DJI Enterprise-drönare
Steg-för-steg-instruktioner för att uppnå noggranna resultat med din DJI Enterprise-drönare.
Post-Processed Kinematic (PPK) är en metod för att använda GNSS-data (Global Navigation Satellite System) för att noggrant fastställa en drönare eller en rovers position och rörelsebana. PPK innebär att man samlar in rå GNSS-data från en drönare tillsammans med information om position och rörelsebana från närliggande referensstationer, och därefter bearbetar dessa data i efterhand för att förbättra noggrannheten i positions- och rörelseinformationen.
Innehållsförteckning
Introduktion till PPK-processen
Fördelar och nackdelar: RTK vs PPK
PPK-arbetsflöde
Steg 1: Förberedelse och planering
Kompatibel utrustning och programvara
Inställningar i DJI Pilot 2
Steg 2: Insamling av drönardata
Steg 3: Insamling av referensdata
Via CORS
Via DJI D-RTK eller tredjepartsbasstation
Steg 4: Datajustering och PPK-bearbetning
Fotogrammetri - DJI Terra
Tredjepartsprogramvara
LiDAR - DJI Terra
Steg 5: Överskrivning av POS-data i fotogrammetri
Slutsats
Introduktion till PPK-processen
PPK används ofta i tillämpningar som inmätning, kartläggning och precisionsjordbruk, där hög positioneringsnoggrannhet är avgörande. Till skillnad från RTK (Real-Time Kinematic), som kräver trådlös realtidsanslutning till referensstationer, kan PPK genomföras i efterhand, vilket ger större flexibilitet vid datainsamling.
Efterbearbetningen av GNSS-data innebär att man använder specialiserad programvara för att bearbeta den råa data som samlats in av mottagaren och jämföra den med data från närliggande referensstationer för att exakt fastställa drönarens position vid en given tidpunkt. Denna process korrigerar fel som orsakats av exempelvis atmosfäriska förhållanden och avvikelser i satellitbanor, vilket leder till ökad noggrannhet.
Både RTK och PPK kan användas för kartläggning med drönare, men det finns vissa fördelar med att använda PPK jämfört med RTK:
Fördelar och nackdelar: RTK vs PPK
Fördelar med RTK
Direkt återkoppling: RTK ger realtidsfeedback under uppdraget, vilket gör det enklare att identifiera och åtgärda problem direkt.
Snabb databehandling: RTK-data kan behandlas snabbt, vilket möjliggör snabbare leverans av slutprodukten.
Användarvänligt: RTK är generellt enklare att använda än PPK och kräver mindre kompetens vid uppsättning och drift.
Nackdelar med RTK
Lägre noggrannhet: RTK:s noggrannhet kan påverkas av kommunikationsfördröjningar eller avbrott, vilket gör det mindre exakt än PPK.
Kommunikationsberoende: RTK kräver realtidskommunikation med en referensstation under flygningen. Detta kan vara problematiskt i avlägsna eller lantliga områden med begränsad eller ingen mobiltäckning, särskilt vid användning av NTRIP-protokollet.
Högre kostnader: RTK kan vara dyrare än PPK på grund av behovet av extra RTK-moduler eller abonnemang på NTRIP-tjänster.
Fördelar med PPK
Ingen realtidskommunikation krävs: Till skillnad från RTK kräver PPK inte realtidskommunikation mellan drönaren och markstationen, eftersom korrektionerna appliceras i efterhand vid bearbetning.
Större flexibilitet: Med PPK kan drönaren samla in data under uppdraget och bearbetningen kan göras senare. Detta ger större flexibilitet, särskilt i områden med begränsad eller ingen mobiltäckning.
Högre noggrannhet: Både RTK och PPK ger hög precision, men PPK kan ge ännu bättre noggrannhet då det inte påverkas av kommunikationsproblem. Dessutom kan fler referensstationer användas vid efterbearbetning, vilket ytterligare förbättrar noggrannheten.
Lägre kostnader: PPK är ofta billigare än RTK eftersom det inte kräver realtidskommunikation, vilket minskar behovet av extra utrustning och abonnemang.
Nackdelar med PPK
Längre efterbearbetningstid: PPK kräver efterbearbetning av data, vilket tar tid och kan fördröja leveransen av slutprodukten.
Minimikrav för flygtid: För att uppnå tillräckligt exakt positioneringsdata måste drönaren samla in ett visst antal GNSS-punkter under flygningen. Detta innebär att drönaren måste flyga en viss tid och distans för att samla in tillräcklig data för PPK-bearbetning. Den exakta tiden och distansen varierar beroende på GNSS-mottagare, referensdata och flygmiljö. Generellt rekommenderas minst 10 minuters flygtid för att samla in tillräcklig GNSS-data för noggrann PPK-bearbetning, men detta kan variera beroende på projektets krav och datakvalitet.
Valet mellan PPK eller RTK för ett kartläggningsprojekt beror i slutändan på projektets specifika krav – inklusive behov av flexibilitet, kostnader och uppdragets omfattning. Även om båda metoderna har sina för- och nackdelar, spelar DJI:s RTK-drönare en viktig roll i att förena dessa två metoder: DJI Enterprise RTK-drönare loggar alltid satellitobservationsdata. Detta innebär att även om en instabil mobilmiljö stör realtidskommunikationen under ett RTK-uppdrag, kan användaren ändå hämta referensdata i efterhand och använda PPK-metoden som backup för att uppnå centimeternoggrann positionering.
PPK-arbetsflöde
Att genomföra ett PPK-arbetsflöde med bilddata från drönare kan initialt verka komplext, men processen blir tydlig och hanterbar med god planering och noggrannhet. Arbetsflödet består av flera centrala steg:
1. Förberedelse och planering: Innan insamling av drönardata måste uppdraget planeras noggrant. Detta innefattar att säkerställa tillräcklig flygtid i planeringsverktyget för drönaruppdraget. En välplanerad flygning garanterar att tillräckligt med data samlas in för en noggrann PPK-bearbetning.
2. Insamling av drönardata: Efter planering är det dags att genomföra flygningen och samla in bilddata samt motsvarande GNSS-data från drönarens mottagare. Denna GNSS-data ska innehålla rå satellitdata samt tidsstämplar.
3. Insamling av referensdata: Utöver data från drönaren krävs även referensdata från närliggande GNSS-referensstationer, exempelvis CORS (Continuously Operating Reference Station) eller andra markbaserade mottagare. Referensdatan måste matcha GNSS-signaler och tidsinformation från drönardatan. Noggrann referensdata är avgörande för att säkerställa hög precision i PPK-processen.
4. Datajustering och PPK-bearbetning: När all data har samlats in är nästa steg att synkronisera bilddata med GNSS-data baserat på tid. PPK-programvara kan matcha tidsinformationen mellan bilderna och GNSS-punkterna. Efter detta används PPK-program eller onlinetjänster för att genomföra bearbetningen. Processen kombinerar GNSS-data från både drönaren och referensstationer för att räkna fram exakt position för varje bildruta.
5. Överskrivning av POS-data: Det är viktigt att den nya POS-datan (Position and Orientation System) importeras korrekt i din fotogrammetriproduktion. Noggrannheten i fotogrammetriska modeller är beroende av kvaliteten på indata. Säkerställ att POS-datan är kompatibel med din programvara och att den verkligen har överskrivits.
Steg 1: Förberedelse och planering
Alla DJI Enterprise-system har inte stöd för att generera de data som krävs för PPK. Drönaren måste vara utrustad med särskild hårdvara som möjliggör inspelning av rå GNSS-observationsdata.
Innan du påbörjar arbetsflödet, kontrollera att ditt system är kompatibelt med PPK-funktionalitet. Nedan följer en lista på kompatibla drönare och nyttolaster som uppfyller dessa krav.
Kompatibel utrustning och programvara för PPK-arbetsflöde
För att kunna genomföra ett komplett PPK-arbetsflöde krävs kompatibel hårdvara och programvara. Nedan följer en översikt över godkända drönarsystem, planeringsverktyg och programvaror för efterbearbetning.
UAV och kameramoduler (något av följande alternativ krävs):
DJI Mavic 3D och Mavic 3T
Planeringsprogramvara för flyguppdrag:
DJI Pilot 2-appen
DJI FlightHub 2
Källor för referensdata i RINEX- och navigationsfilformat:
Tredjepartsbasstationer eller CORS-nätverk (t.ex. NGS CORS, online)
PPK-bearbetningsprogramvara:
Tredjepartsprogram, exempelvis:
Emlid Studio
REDcatch
Propeller Aero
Fotogrammetriprogramvara:
Tredjepartsprogram för fotogrammetri
Innan flygning: Inställningar i DJI Pilot 2
Förbered din flygning genom att konfigurera DJI Pilot 2-appen korrekt. Här är några viktiga tips:
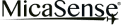
Tips 1: Aktivera alternativet “Mechanical Shutter” (mekanisk slutare) och avaktivera “Dewarping” (bildrätning) om dessa alternativ är tillgängliga.
Pilot 2 app - Mechanical Shutter and Dewarping Settings
Tips 2: PPK-filer genereras vanligtvis automatiskt när data samlas in via automatiserade uppdrag. I sällsynta fall där du behöver starta PPK-inspelning manuellt kan du göra det genom att gå till kamerainställningarna och välja alternativet ”Create Folder”. Detta skapar en ny uppdragsmapp, startar loggning av alla relevanta PPK-filer och sparar dem tillsammans med tagna bilder eller LiDAR-data.
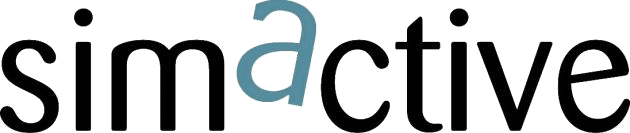
Tips 3: Det är viktigt att notera att PPK-processen kräver efterbearbetning av data, vilket kan ta tid och fördröja leveransen av den slutliga produkten. För att uppnå noggrann positioneringsdata med PPK krävs dessutom att tillräckligt många GNSS-datapunkter samlas in under flygningen. Den exakta flygtiden och distansen beror på faktorer såsom vilken GNSS-mottagare som används, kvaliteten på referensstationens data och flygförhållandena. Generellt rekommenderas att man flyger i minst 15 minuter för att samla in tillräckligt med GNSS-data för noggrann PPK-bearbetning. I Pilot-appen kan du kontrollera beräknad flygtid under fliken för uppdragsöversikt.
Pilot 2 app- Estimated Flight Time
Steg 2: Insamling av drönardata
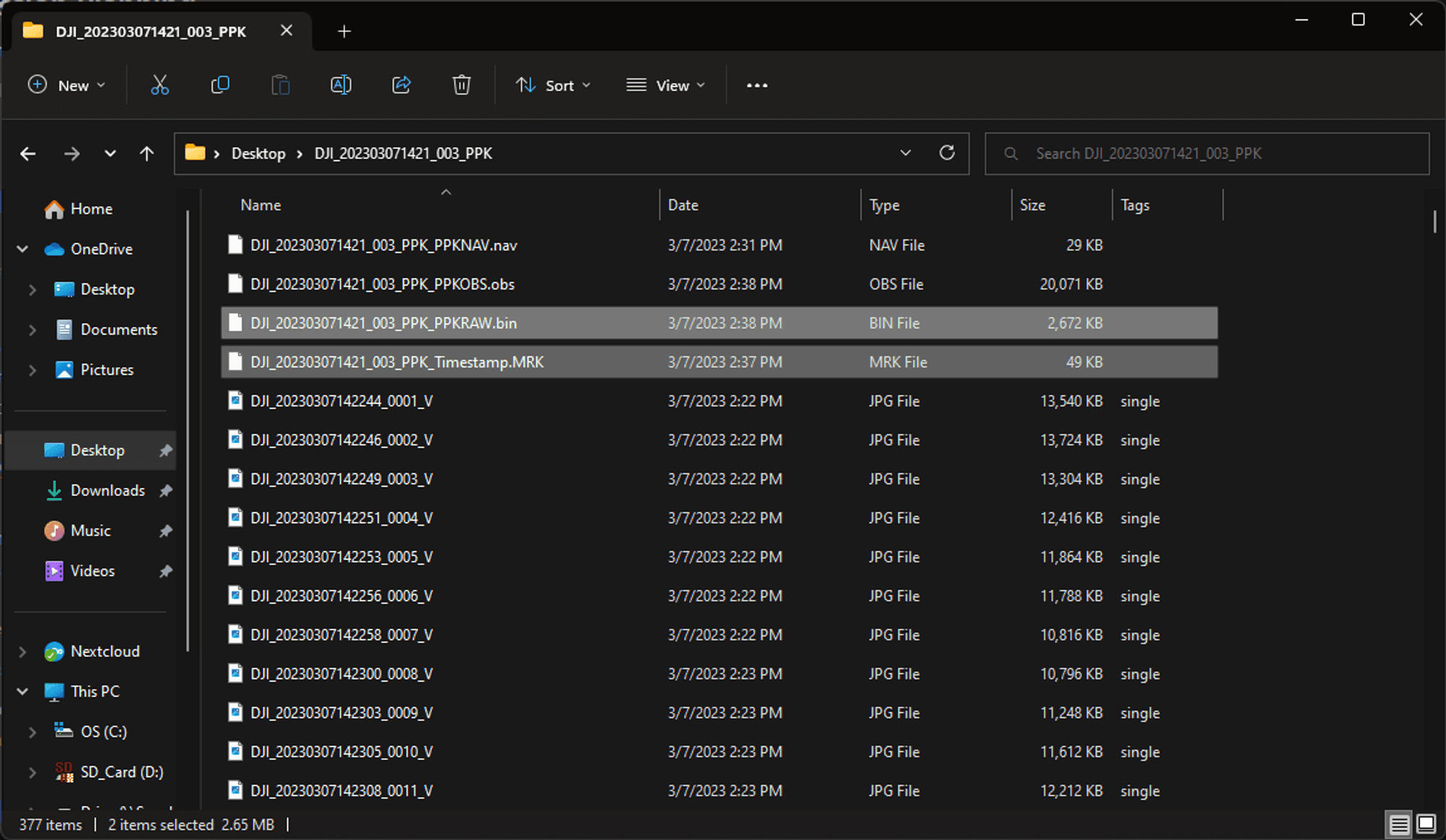
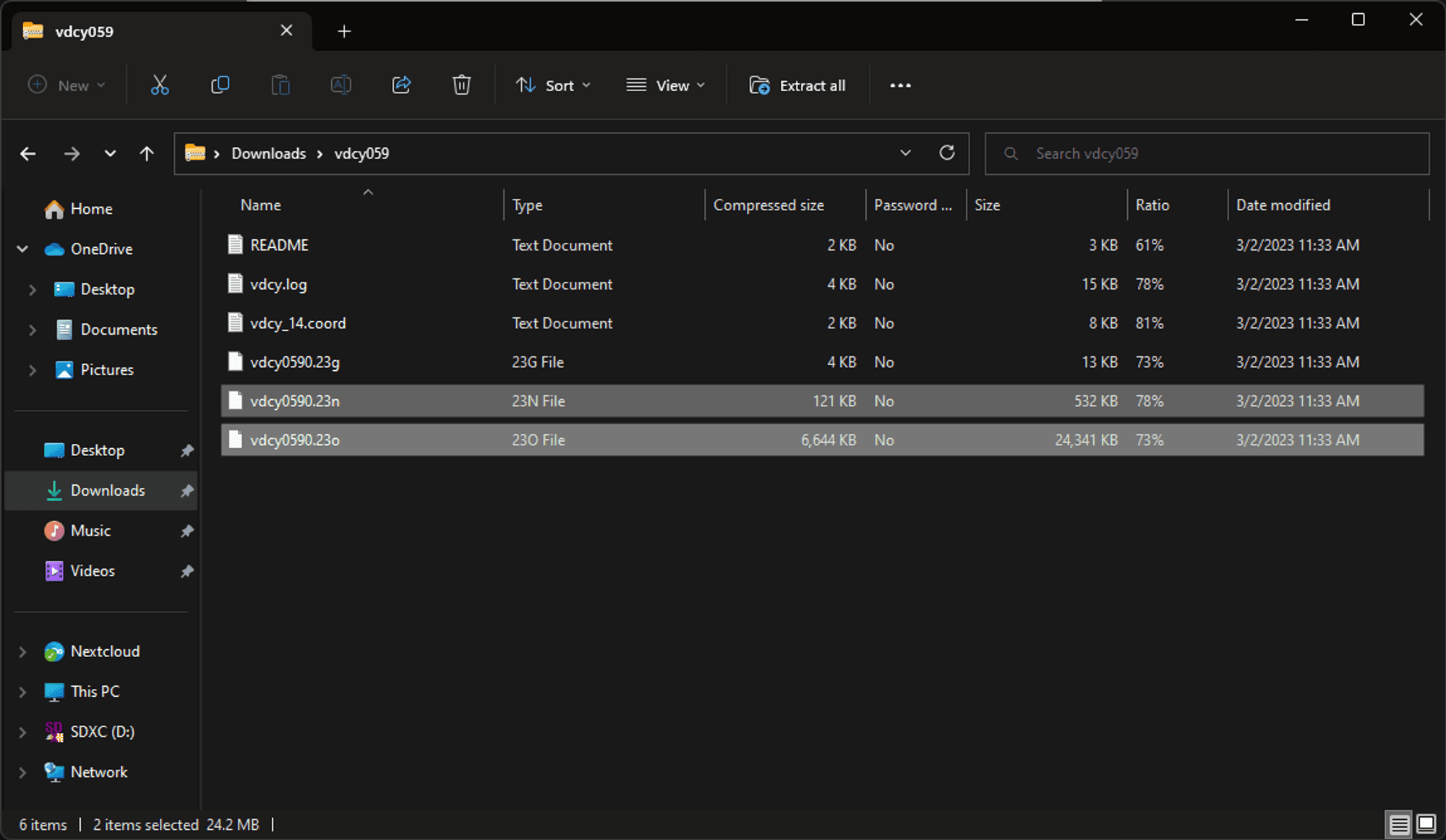
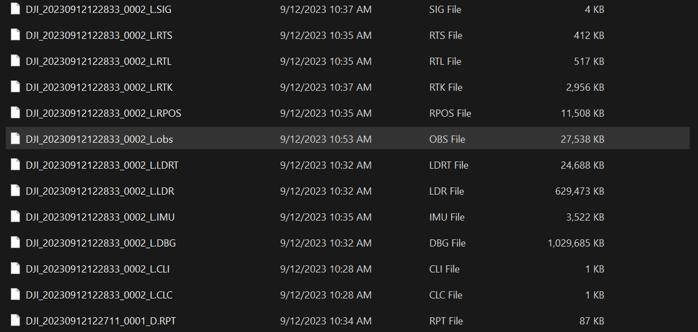
För att kunna genomföra PPK-metoden korrekt är det avgörande att förbereda drönardatan på rätt sätt. Vid fotogrammetri med drönare krävs, utöver råbilderna, fyra ytterligare filer från bildmappen (beroende på drönarmodell eller nyttolast kan filnamn och struktur variera något, men principen är densamma):
.nav-filen är satellitens efemeridfil.
.obs-filen är en satellitobservationsfil i RINEX-format (Receiver Independent Exchange), som genereras i realtid via avkodning.
.bin- eller .rtk-filen innehåller satellitobservationer och efemeriddata från mobilstationen i RTCM-format (Radio Technical Commission for Maritime).
.mrk-filen är en ASCII-fil som sparar tidsstämplar för bildexponering i klartextformat.
Drönarens satellitobservationsdata innehåller råa GPS-mätningar, vilket är avgörande för att uppnå hög positioneringsnoggrannhet. Dessa data används för att korrigera GPS-signalfel som uppstår på grund av exempelvis atmosfäriska förhållanden, satellitgeometri och klockdrift.
Lika viktigt är bildens tidsstämpelfil, som är avgörande för exakt POS-korrigering (Position and Orientation System) av bilden. Den registrerar exakt tidpunkt för varje tagen bild, vilket möjliggör exakt synkronisering mellan bilddata och satellitobservationsdata. Utan denna tidsinformation blir det mycket svårt att korrekt justera bilddatan mot GPS-mätningarna, vilket leder till kraftigt försämrad noggrannhet i slutresultatet.
Utan både satellitobservationsdata och tidsstämpelfil kan inte PPK-processen genomföras. Det är därför nödvändigt att säkerställa att dessa filer samlas in och behandlas korrekt för att PPK-processen ska fungera.
Photogrammetry Raw Data with PPK files
Steg 3: Insamling av referensdata
För att genomföra PPK-bearbetning med hjälp av en basstation krävs vanligtvis två typer av filer kopplade till GNSS-data (Global Navigation Satellite System): en RINEX-fil från basstationen samt en navigationsfil:
RINEX-fil från basstationen: Denna fil innehåller rå GNSS-data som samlats in av basstationen, vanligtvis i RINEX-format. Den inkluderar exakta mätningar av satellitsignaler, positioner och tidsinformation. Filen bör samlas in samtidigt som drönarflygningen eller så nära flygtiden som möjligt. RINEX-filen används som referens för att korrigera drönarens råa GNSS-data från flygningen.
Navigationsfil: Denna fil innehåller information om position och bana för de GNSS-satelliter som används i kartläggningsprojektet. Navigationsfilen används av PPK-programvaran för att beräkna exakt position för varje bild som tagits under flygningen. Navigationsfilen kan hämtas från olika källor, inklusive myndigheter som US National Geodetic Survey (NGS) eller onlinetjänster som International GNSS Service (IGS).
Via CORS:
I detta avsnitt används NGS CORS som exempel för att hämta dessa GNSS-filer.
För att samla in CORS-referensdata via NOAAs (National Oceanic and Atmospheric Administration) UFCORS-tjänst (User Friendly CORS), följ dessa steg:
1. Gå till NCN-webbplatsen och välj "NCN Map" på sidan.
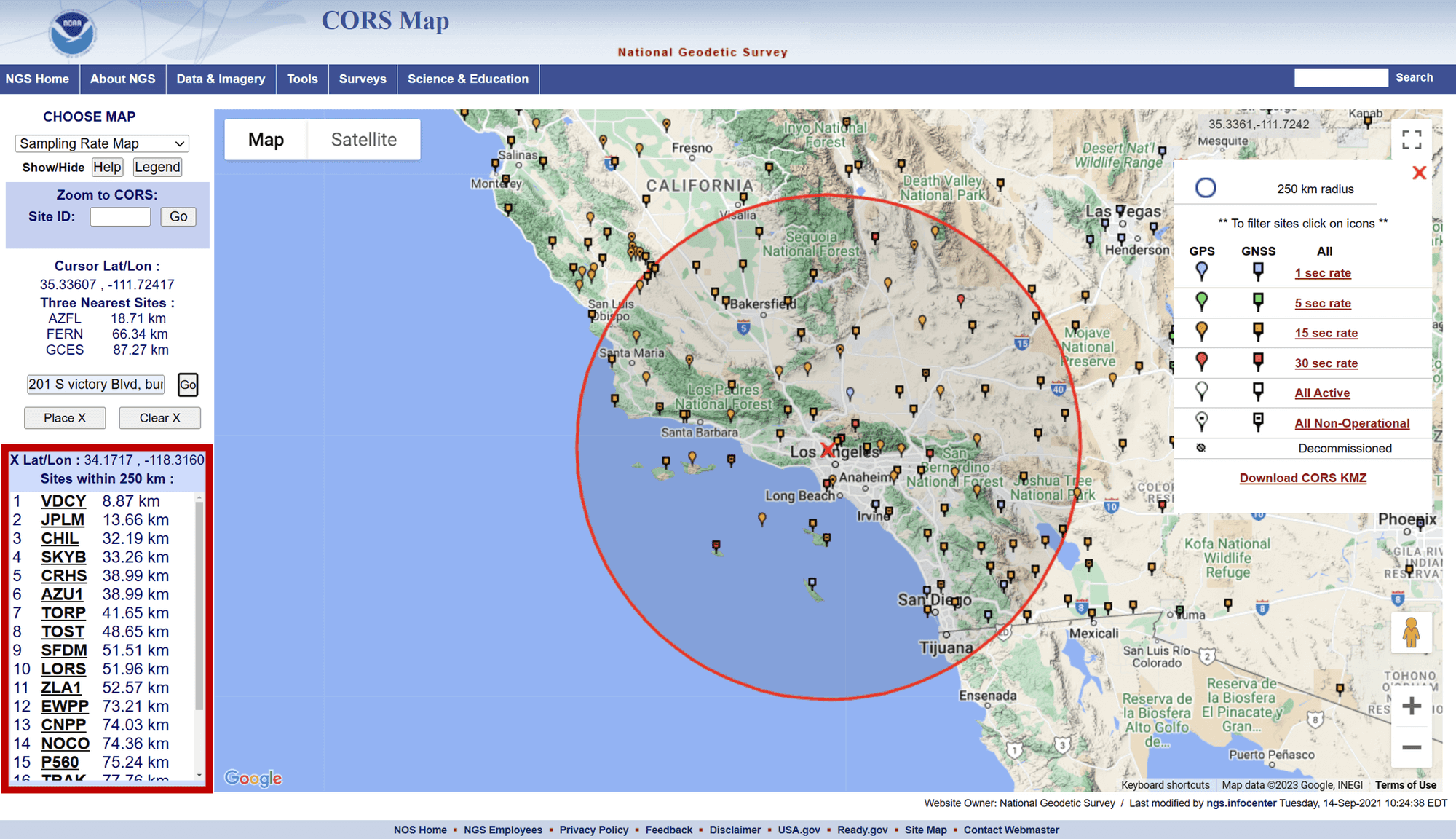
2. Ange adressen för drönarflygningen i sökrutan till vänster och välj "Go".
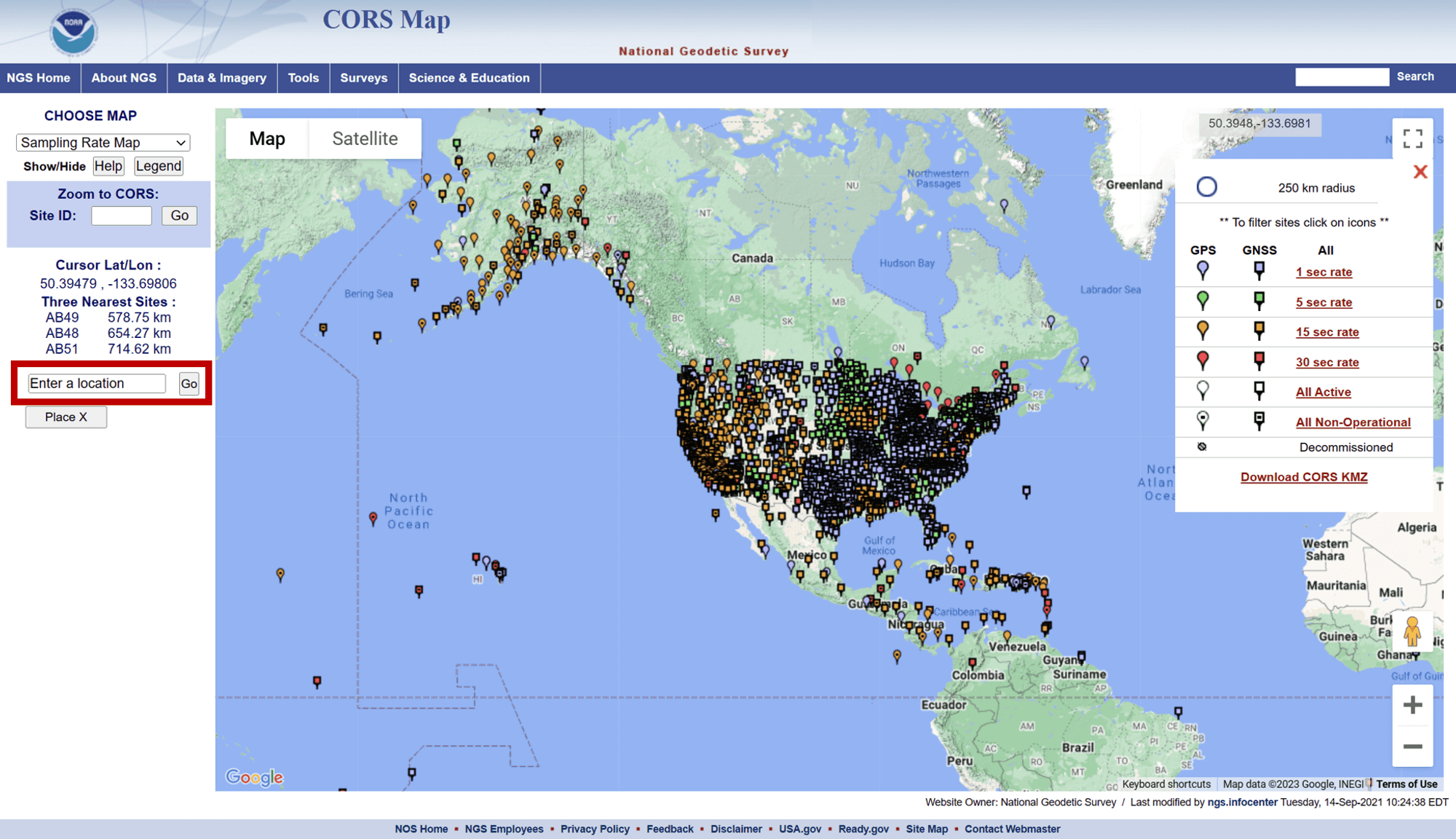
3. Välj en plats med så kort baslinje som möjligt och notera platsens namn. Baslinje syftar på avståndet mellan GNSS-referensstationen och drönaren. Ett kortare baslinjeavstånd ger generellt högre noggrannhet i PPK-resultaten eftersom det minskar risken för fel som orsakas av atmosfäriska förhållanden och andra miljöfaktorer.
Baslinjeavståndet mellan CORS-platsen och drönaren påverkar kvaliteten på referensdata som används i PPK-processen. Ett längre avstånd kan leda till fler fel på grund av exempelvis atmosfäriska störningar, vilket kan försämra noggrannheten i slutresultatet. Därför rekommenderas det att hålla baslinjeavståndet så kort som möjligt, samtidigt som det täcker kartläggningsområdet.
Använd inte platser där baslinjeavståndet överstiger 20 miles (cirka 32 kilometer).
4. Gå till UFCORS-webbplatsen och välj det datumintervall för de data du vill hämta. Välj alternativet ”get CORS data file”. Data kommer att laddas ned som en komprimerad fil (t.ex. .zip).
Det är viktigt att CORS-datan samlas in vid samma tidpunkt som drönarbilderna för att säkerställa korrekt PPK-bearbetning. Du bör också noggrant utvärdera kvaliteten på CORS-datan för att säkerställa att den uppfyller de noggrannhetskrav som gäller för kartläggningsprojektet.
Noggrann planering och korrekt genomförande av både drönaruppdraget och insamlingen av CORS-data är avgörande för att uppnå korrekt PPK-bearbetning och högkvalitativa kartresultat.
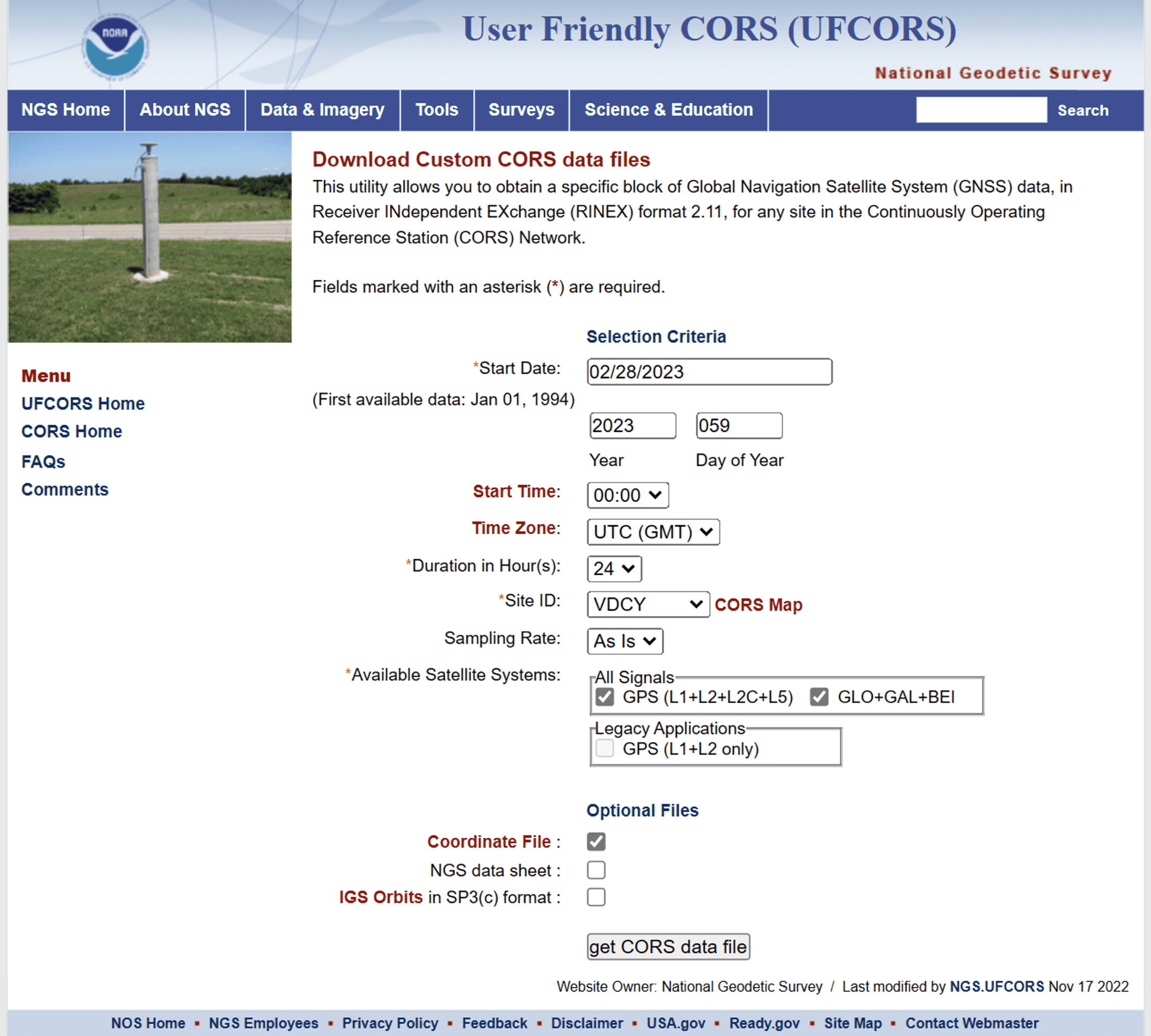
5. Öppna den nedladdade zip-filen och kontrollera att den innehåller följande två filer:
X.YYo (RINEX-fil från basstationen)
X.YYn (Navigationsfil)
Här representerar 'YY' årtalet och 'X' står för stationskoden tillsammans med årets dagnummer.
Via DJI D-RTK eller tredjepartsbasstation:
Om det inte finns någon NGS CORS-basstation i närheten av drönarens operationsområde kan DJI D-RTK-stationen vara ett bra alternativ för att samla in basstationsdata för PPK-bearbetning. För att använda den, placera helt enkelt basstationen över en känd punkt med koordinater enligt WGS84 (EPSG:4326) och ellipsoidisk höjd i meter. Ange sedan offset för basstationens position baserat på den kända 3D-koordinaten i Pilot 2-appen.
Säkerställ att D-RTK-stationen sätts upp på plats före flygningen, och vänta några minuter både före och efter flygningen för att täcka hela flygtiden. Undvik att flytta eller luta stationen under flygningen, då detta kan avbryta dataloggen till följd av ändrad orientering. När flygningen är avslutad ansluter du basstationen till en dator via USB-C och exporterar RTCM-filer i .dat-format som spelats in efter flygningen.
Genom att använda DJI D-RTK-stationen undviker du behovet av extra utrustning och eventuella abonnemangsavgifter som kan krävas för realtidskommunikation. Detta gör PPK-processen mer kostnadseffektiv och ger större flexibilitet vid datainsamling, särskilt i områden med begränsad eller ingen mobiltäckning.
Steg 4: Datajustering och PPK-bearbetning
När du har förberett alla insamlade bilder eller LiDAR-data tillsammans med nödvändiga PPK-filer, inklusive drönarens satellitobservationsdata och referensdata från en basstation, är nästa steg att justera drönar- och basstationsdata och inleda PPK-bearbetningen.
Beroende på om ditt datamaterial består av fotogrammetri eller LiDAR, följ motsvarande arbetsflöde för PPK-bearbetning som beskrivs nedan. Om du inte använder en DJI Enterprise-sensor för fotogrammetri är PPK-processen i stort sett densamma. Du kan hänvisa till guiden för tredjepartsprogramvara längre ner som referens.
PPK-arbetsflöde för fotogrammetri
Via DJI Terra-programvara:
Observera att endast vissa kamerasystem stöds för PPK-bearbetning i DJI Terra. Om bilderna tagits med en kameranyttolast som inte finns i listan nedan stöds de inte för PPK-bearbetning i DJI Terra. Kontrollera även att kamerans och drönarens firmware är uppdaterad till den senaste officiella versionen innan datainsamling.
Kamerasystem som stöds för PPK-bearbetning:
DJI Zenmuse L1 (synliga bilder)
DJI Zenmuse L2 (synliga bilder)
DJI Zenmuse P1
DJI Mavic 3 Multispectral
DJI Mavic 3 Enterprise
DJI Matrice 4 E/T/D/TD
Om din kamera inte finns med i listan ovan kan du fortfarande utföra PPK-justering och bearbetning med tredjepartsprogramvara. Se nästa avsnitt om tredjeparts-PPK-programvara för detaljerade instruktioner.
1. I DJI Terra-programvaran, välj “New Reconstruction Mission” och importera alla bilder. Under alternativet ”POS Data”, välj “Local PPK”.
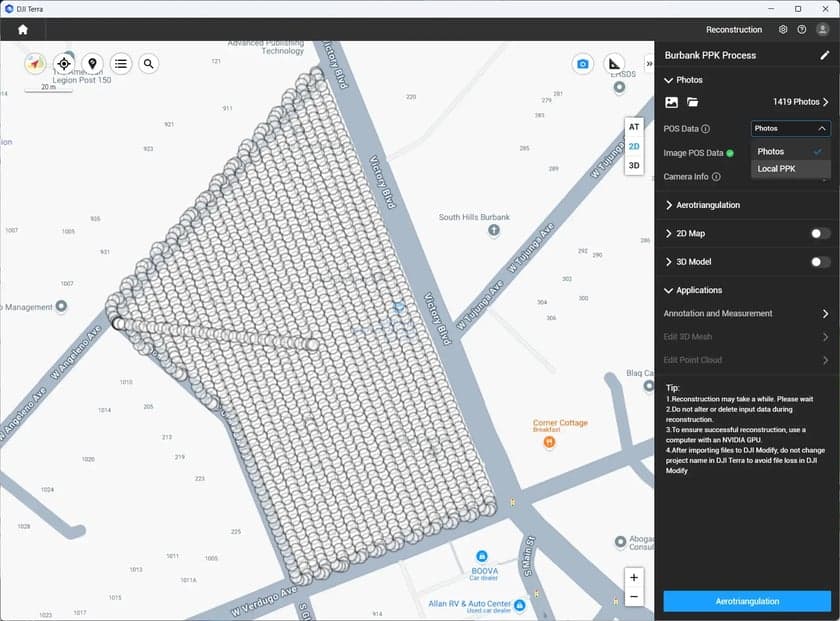
Local PPK in DJI Terra
2. Gå in i inställningarna för Local PPK och välj alternativet ”Add Base Station File”.
Härifrån kan du välja basstationsfilen i olika format.
Om du har använt en DJI D-RTK-basstation för att samla in basstationsdata, kommer du att hitta en .dat-fil i D-RTK-datakatalogen efter att ha anslutit stationen till en dator via USB-kabel.
Om du använder en tredjepartsbasstation eller är ansluten via ett CORS-nätverk kan du välja en RINEX- eller RTCM-fil, beroende på vilket format av satellitobservationsdata som tillhandahålls av systemet.
I detta blogginlägg används en CORS .YYo RINEX-fil som exempel – välj ”RINEX”.
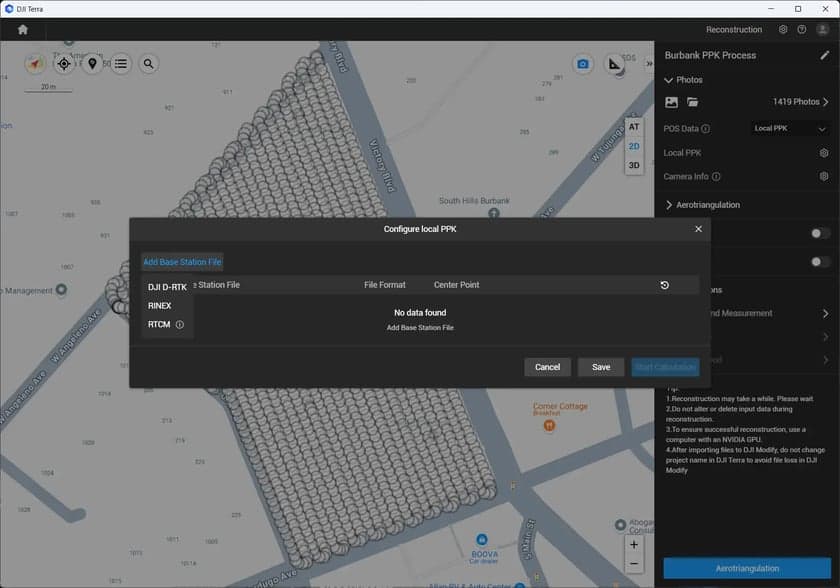
Configurate local PPK - DJI Terra
3. Här behöver vi byta filändelse på vår RINEX-fil från .YYo till .obs, och därefter välja ”Open” för att importera och ladda in basstationens RINEX-fil.
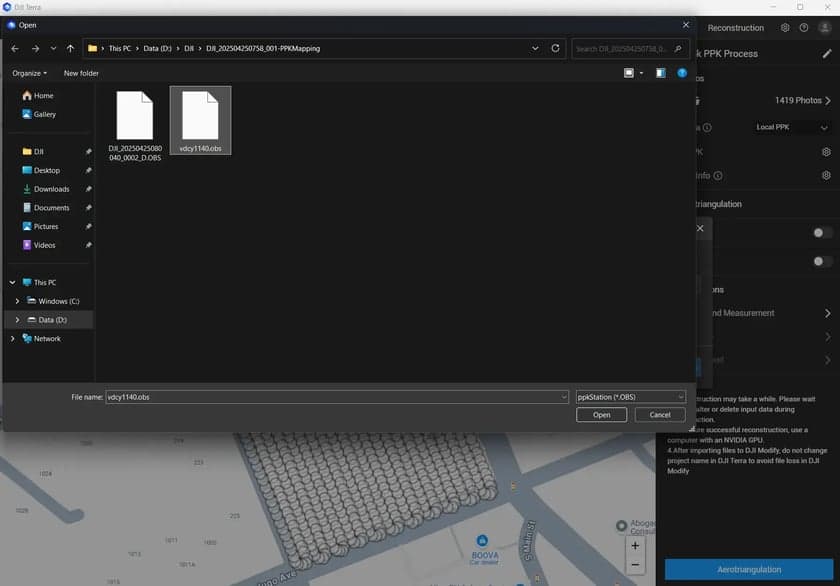
RINEX-filval – DJI Terra
4. I fönstret ”Configure Local PPK” definierar du det regionala horisontella koordinatsystemet baserat på källan till RINEX-filen.
Om du använder en tredjeparts RTK-basstation kan information om koordinatsystemet vanligtvis hittas i stationens inställningar.
Beroende på region kan observationsfilen vara registrerad med olika koordinattransformationer. Till exempel används i USA oftast NAD83(2011) som horisontellt koordinatsystem i geografiska latitud- och longitudvärden, och höjdreferensen är vanligtvis ellipsoidisk höjd i meter.
I detta fönster kan du också manuellt justera basstationens koordinater för att korrigera dess position baserat på mer noggranna eller korrigerade värden, om det behövs.
När alla fält har bekräftats, välj ”Start Calculation” för att påbörja PPK-processen.
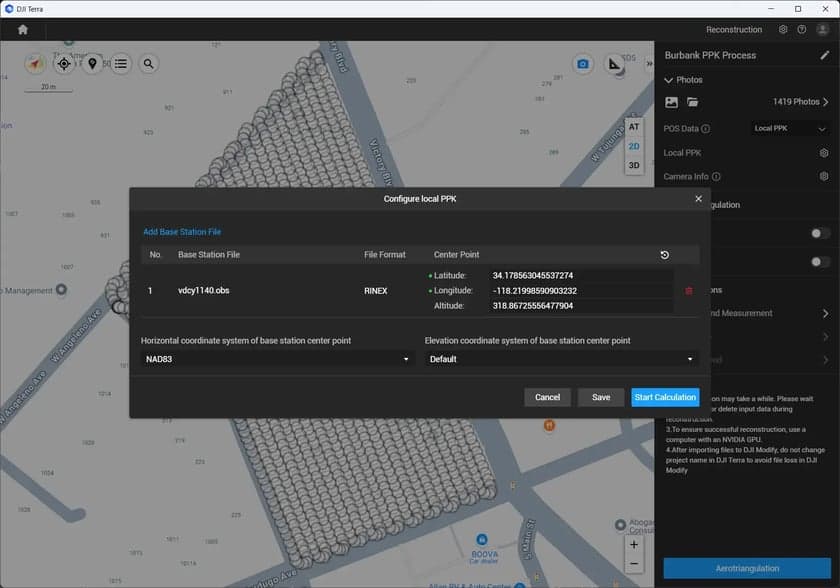
Configure local PPK - DJI Terra
5. När beräkningen är klar hittar du den nyberäknade POS-datan för bilderna. Därifrån kan du välja alternativet ”Export” för att exportera den nya POS-datan i antingen .txt- eller .csv-format. Detta gör att du kan spara den nyberäknade POS-datan utan att skriva över den befintliga POS-informationen för bilderna.
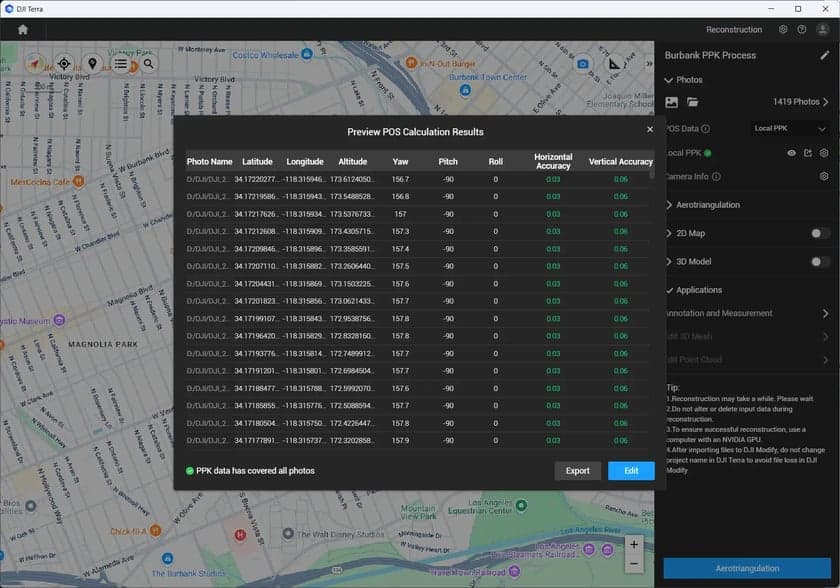
POS Calculation Results - DJI Terra
6. När beräkningen är slutförd visas en grön bock bredvid alternativet ”Local PPK”, vilket indikerar att PPK-processen har slutförts framgångsrikt. Du kan nu fortsätta med det vanliga fotogrammetriarbetsflödet och hoppa över nästa steg, eftersom den nya POS-datan redan har tillämpats.
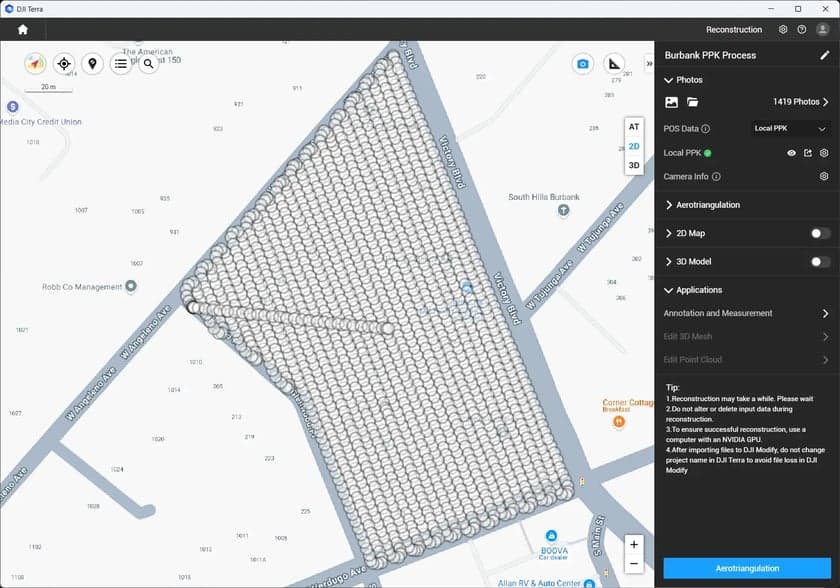
Photogrammetry Process Mission - DJI Terra
Via tredjepartsprogramvara:
Detta avsnitt beskriver en steg-för-steg-guide för att använda drönardata tillsammans med GNSS-roverfiler som samlats in från exempelvis NGS CORS, tredjepartsbasstationer eller DJI D-RTK-stationer för att starta ett PPK-arbetsflöde (Post-Processed Kinematic).
Även om DJI Terra rekommenderas för PPK-processen på grund av sin integration och användarvänlighet, begränsar DJI inte användare från att använda andra verktyg de är mer bekanta med. Användare är fria att använda valfri kompatibel tredjepartsprogramvara för att korrigera POS-data (Position and Orientation System) för bilder.
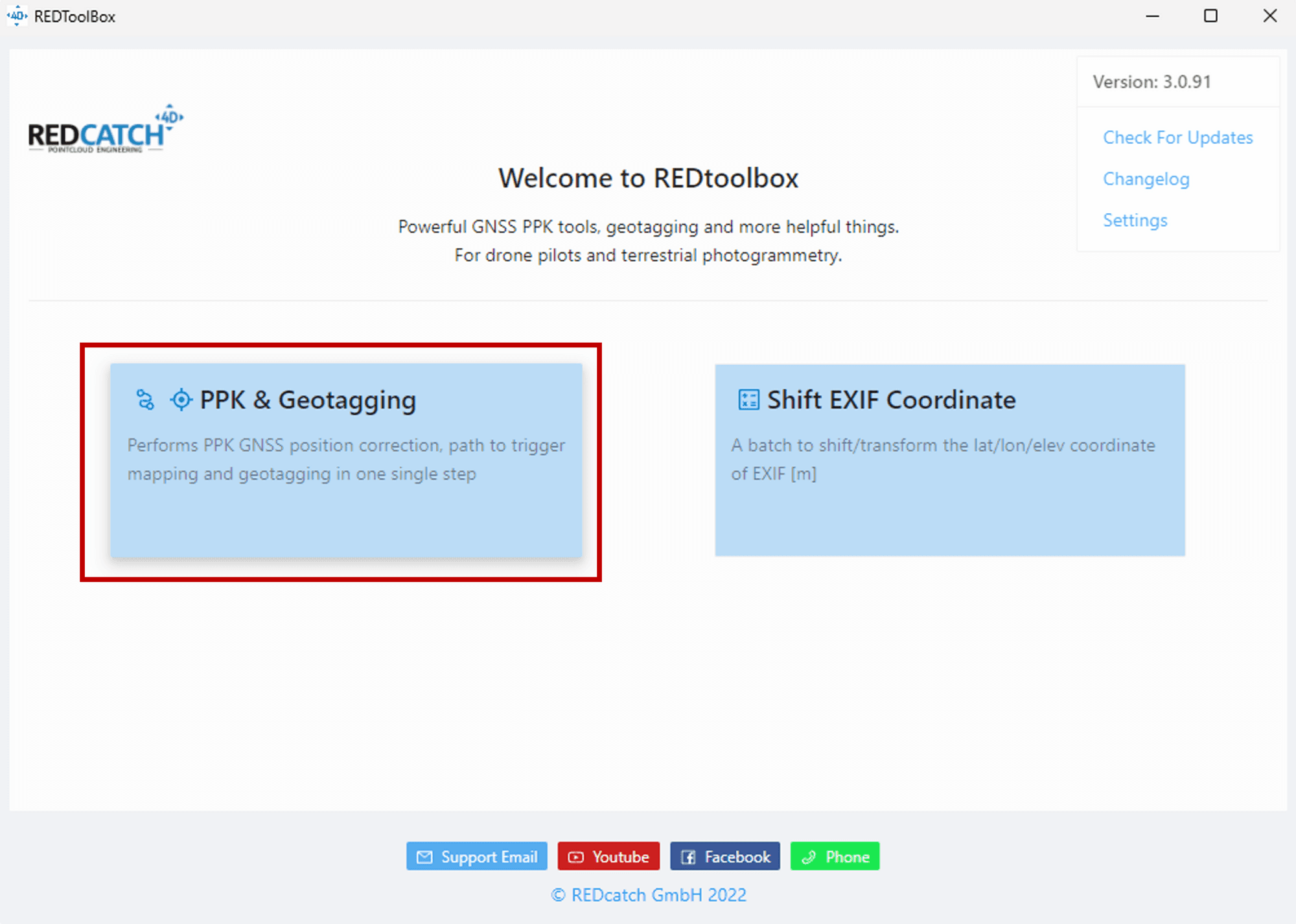
I följande avsnitt används RedCatch REDToolBox som exempel på en tredjepartslösning för PPK-korrigering av bilddata.
1. Börja med att öppna RedCatch REDToolBox och välj alternativet "PPK & Geotagging".
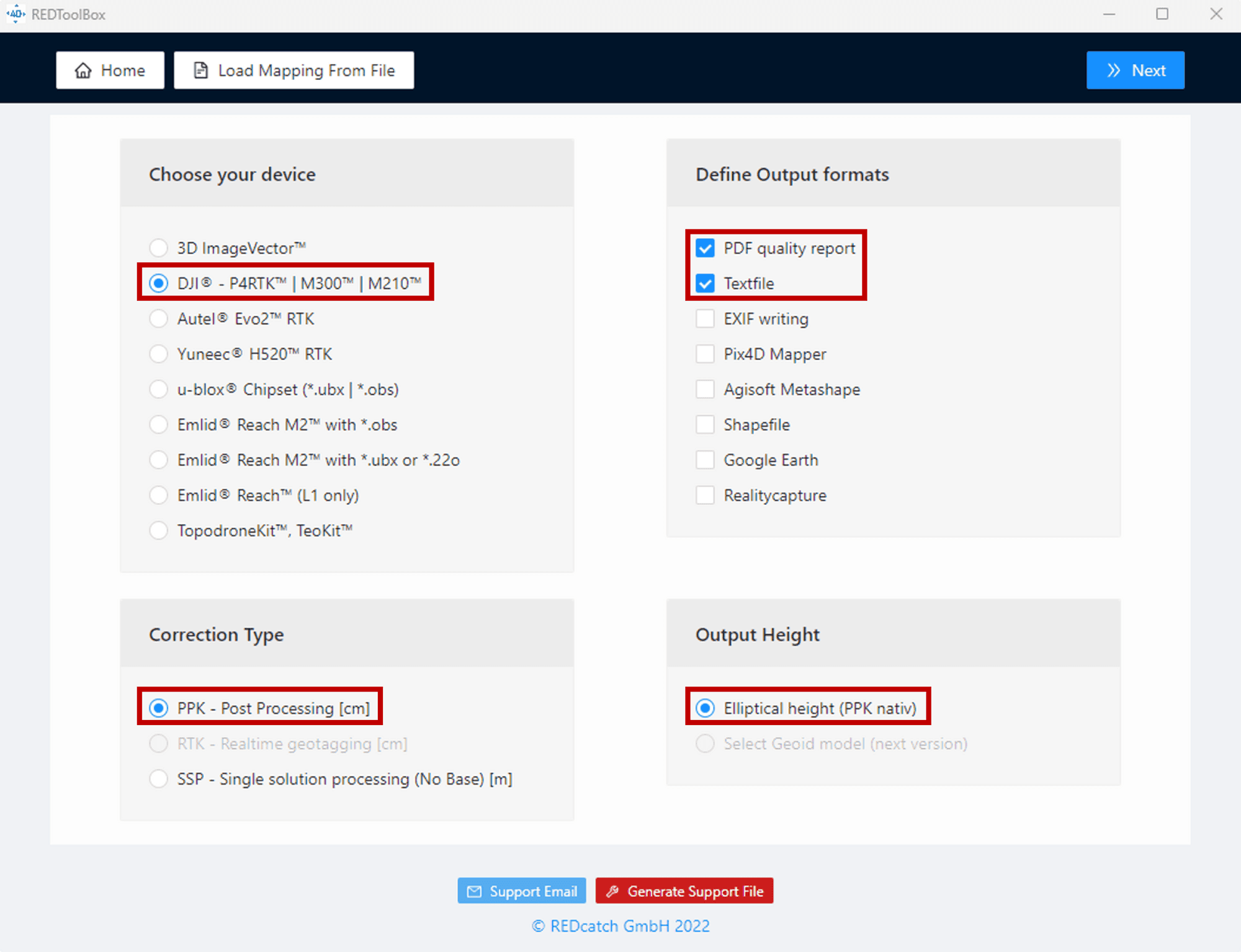
2. Detta val uppmanar dig att välja DJI som enhetstyp och att välja PDF quality report och textfile som utdataformat. Välj därefter PPK som korrektionstyp och Elliptical height (PPK native) som höjdformat. Klicka sedan på "Next".
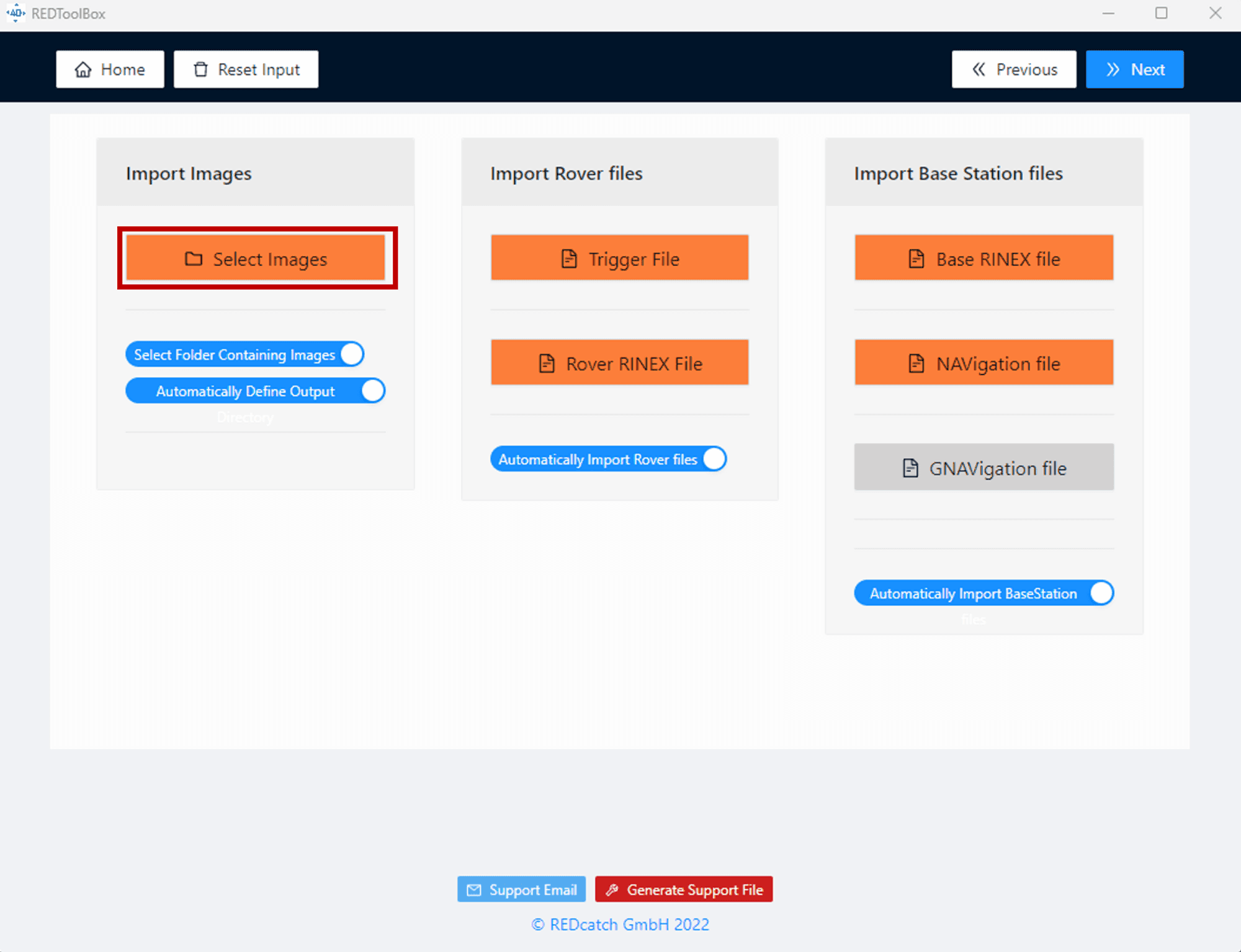
3. För att importera bilder, gå till avsnittet "Import Images" och välj "Select Images" för att ange mappen med råbilderna. Detta säkerställer att bilderna importeras korrekt för PPK-processen.
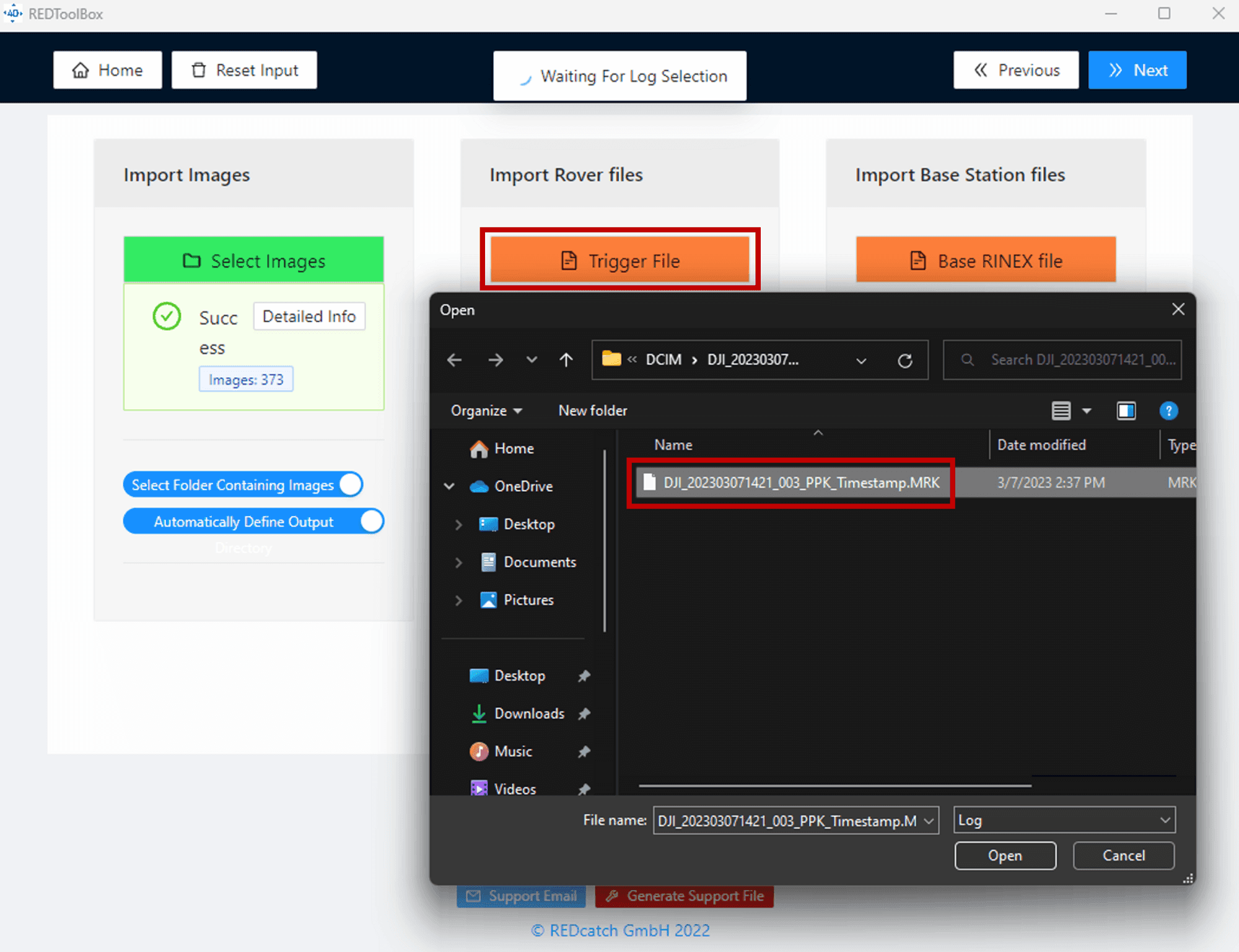
4. Gå vidare till avsnittet "Import Rover files" och välj alternativet "Trigger File". Här importerar du MRK-filen med namnet "XXX_Timestamp.MRK" som finns i mappen med råbilder. Denna fil innehåller viktig information om bildens tidsstämplar som används i PPK-processen.
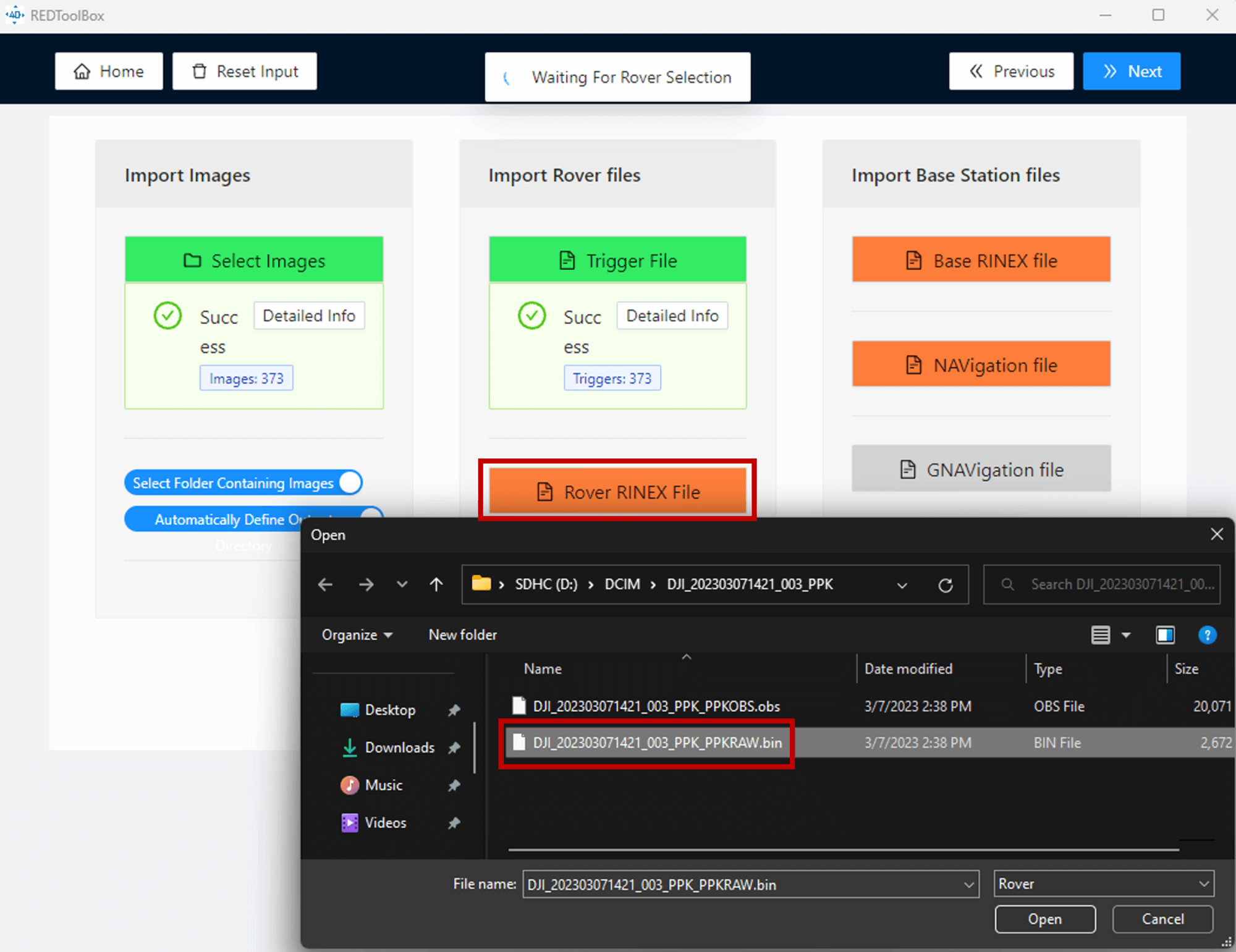
5. Efter att MRK-filen har importerats, välj alternativet "Rover RINEX file" igen och importera RINEX-filen med namnet "XXX_PPKRAW.bin" från mappen med råbilder. Kontrollera att rätt fil valts, då denna är avgörande för ett lyckat resultat.
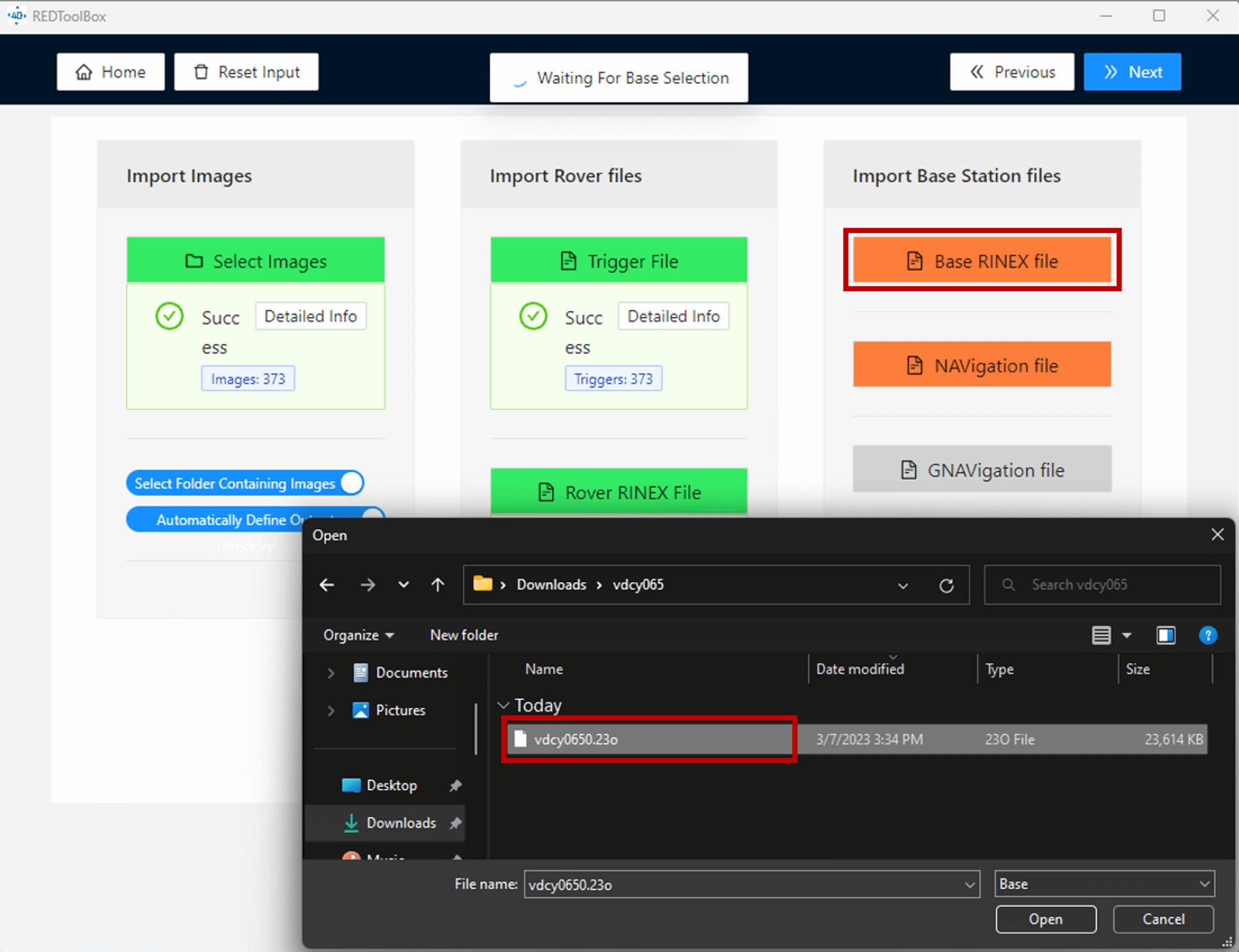
6. Gå vidare till avsnittet "Import Base Station Files", välj alternativet "Base RINEX file" och importera RINEX-filen med namnet "XXX.xxo" från mappen med satellitdata som laddats ner från UFCORS. Om du använder DJI D-RTK 2 Mobile Station för PPK, välj och importera istället RTCM-filen i .dat-format här. Om du behöver slå samman flera .dat-filer till en, använd verktyget merge_bin.bat och kör det i samma katalog som filerna.
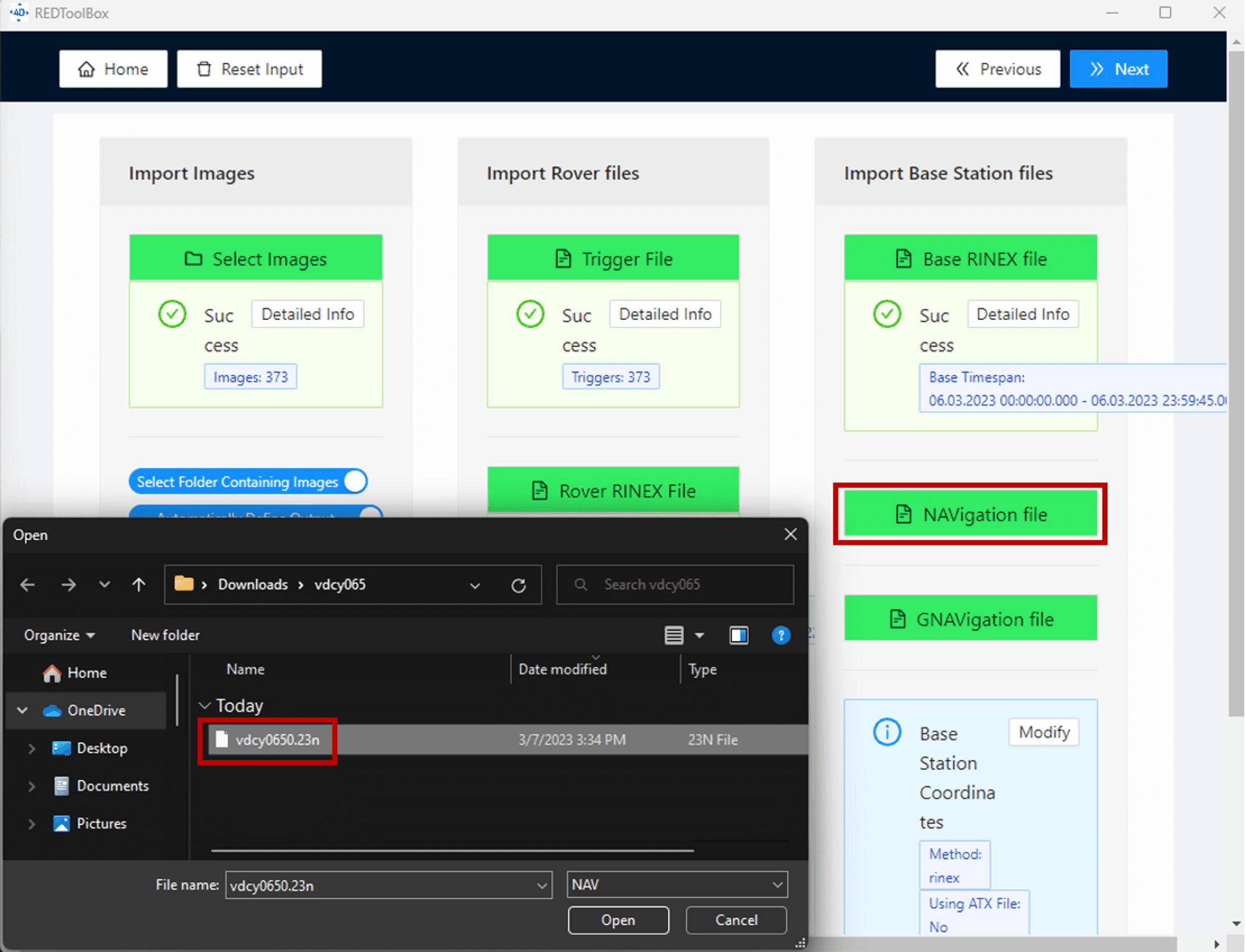
7. När du har valt XXX.xxo-filen från satellitdatamappen bör navigations- och GNAV-filerna importeras automatiskt. Om detta inte sker kan dessa två filer hittas i samma mapp som satellitdata från UFCORS.
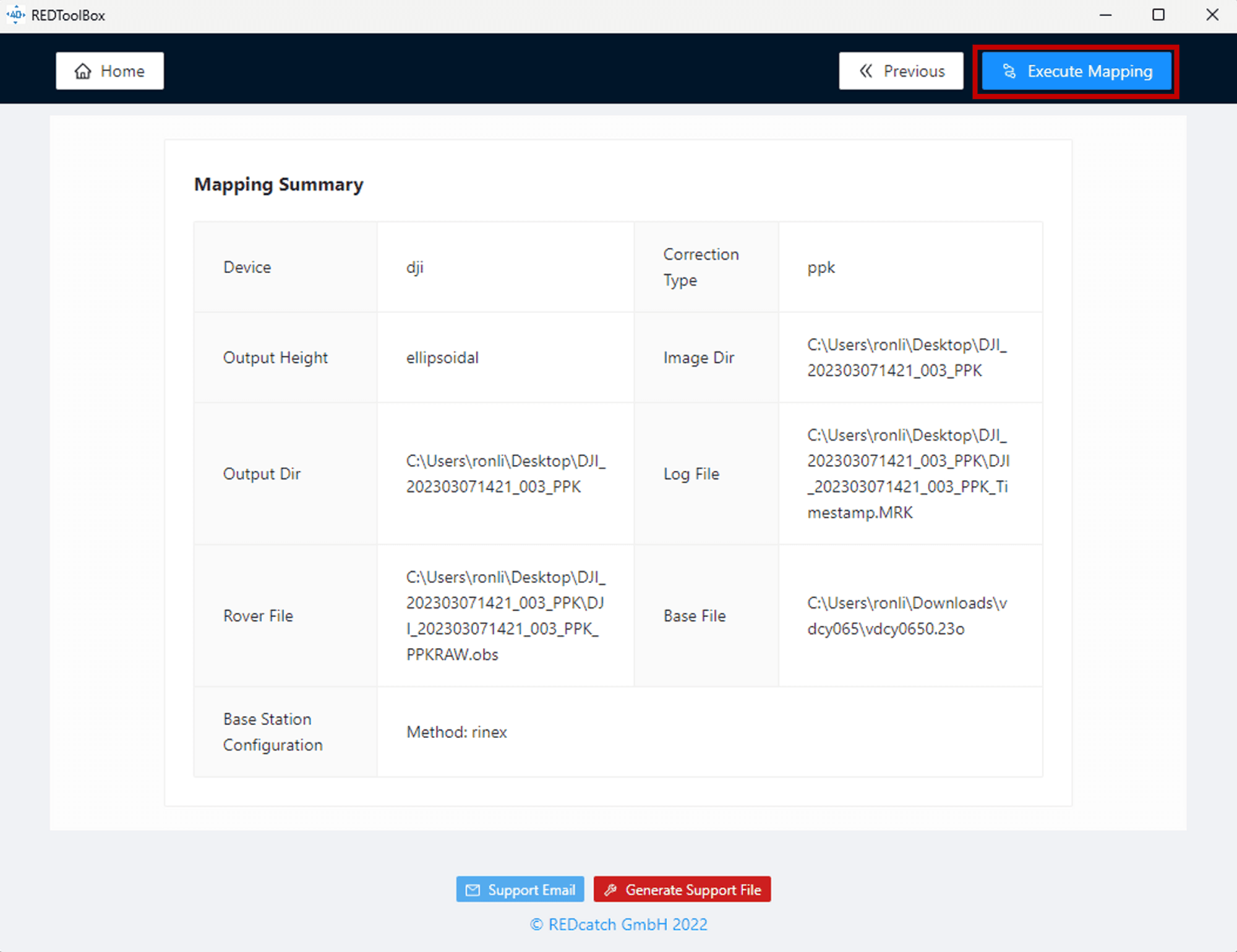
8. Granska sedan sammanfattningen av kartläggningen och välj "Execute Mapping" för att påbörja PPK-processen.
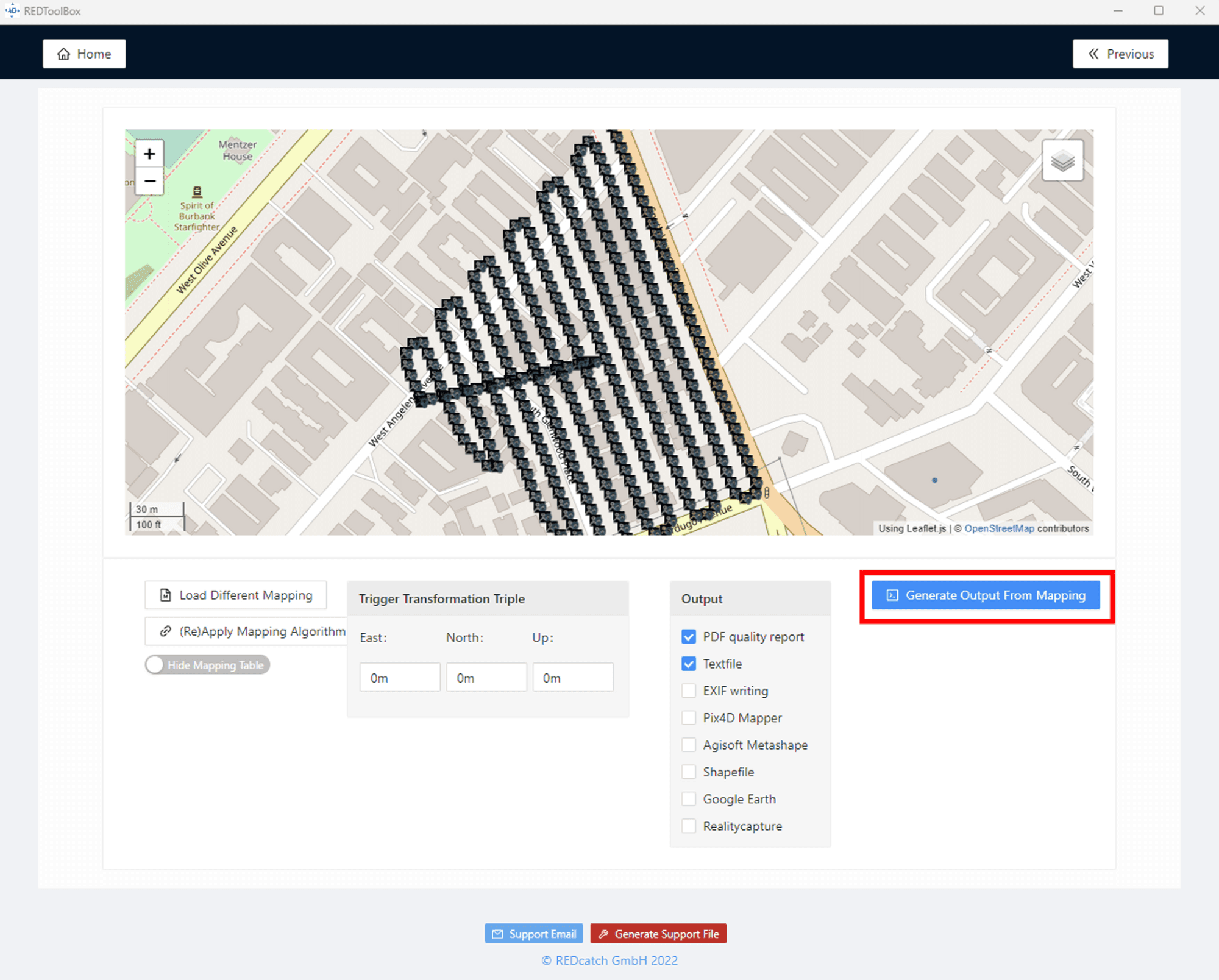
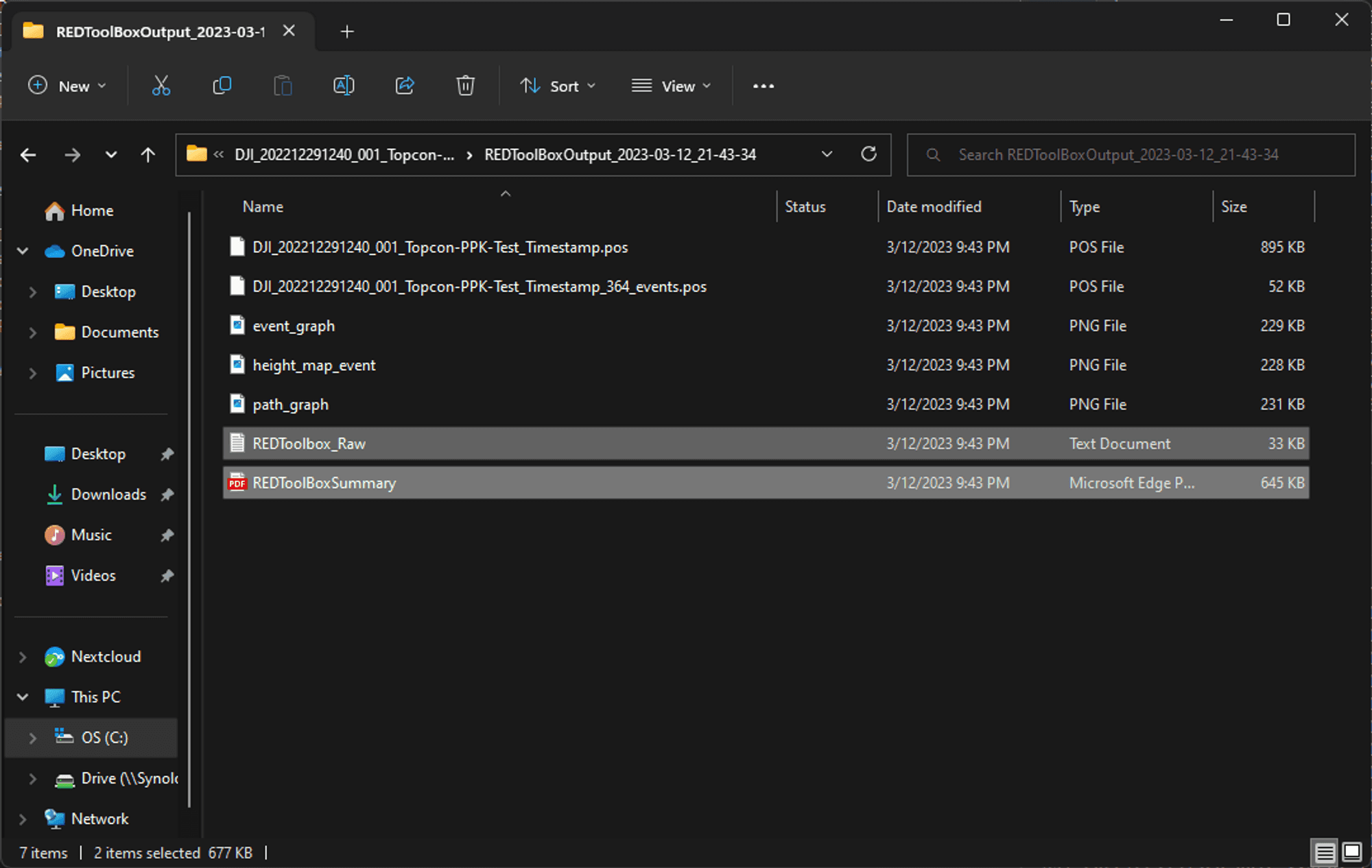
9. När processen är klar, markera alternativen "PDF quality report" och "textfile", och välj därefter "Generate Output From Mapping".
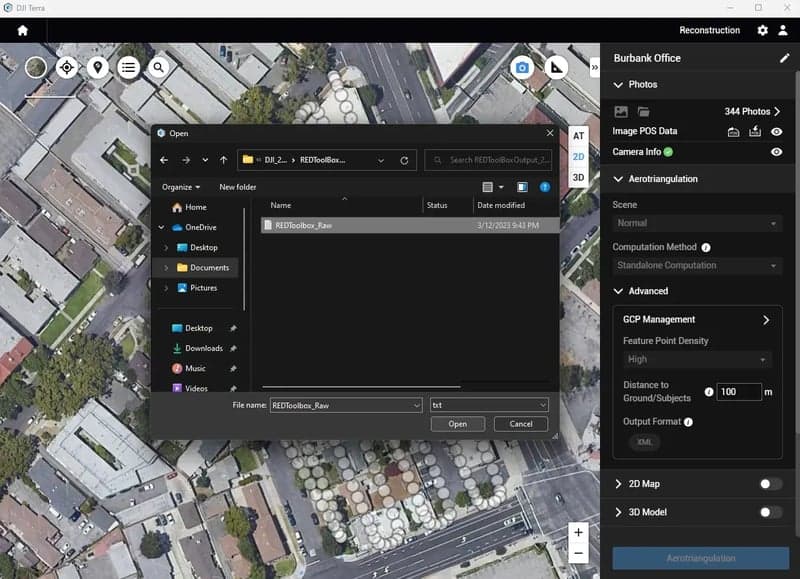
10. För att säkerställa att både den korrigerade POS-filen (REDToolbox_Raw.txt) och sammanfattningsrapporten (REDToolBoxSummary.pdf) exporteras, öppna utmatningsmappen. Senare kommer den första tidsstämplade filen med korrigerad POS-data att användas för fotogrammetriprocessen.
LiDAR PPK-arbetsflöde
Innan vi börjar: Observera att endast specifika LiDAR-system stöds för PPK-bearbetning i DJI Terra. Om data har samlats in med en nyttolast som inte finns med i listan nedan, stöds inte PPK-bearbetning i DJI Terras programvara. Kontrollera även att firmware för både LiDAR-nyttolasten och drönaren är uppdaterad till den senaste officiella versionen innan datainsamling.
LiDAR-system som stöds för PPK-bearbetning:
DJI Zenmuse L1
DJI Zenmuse L2
1. För att bearbeta LiDAR-data från DJI Zenmuse L-serien med PPK-metoden, se till att basstationsfilen är förberedd i förväg. DJI LiDAR stöder följande filformat för basstationsdata och motsvarande versioner:
SupportedData Format | Version | Message Type | Filnamn och ändelse ska ändras till: |
|---|---|---|---|
RINEX | V2.1.x | / |
|
RTCM | V3.0 | 1003, 1004, 1012, 1014 |
|
V3.2 | MSM4, MSM5, MSM6, MSM7 |
| |
OEM | OEM4 | RANGE |
|
OEM6 | RANGE |
| |
UBX | / | RAWX |
|
Det rekommenderas att baslinjen, det vill säga avståndet mellan den basstation som använts för PPK och drönaren, är inom 10 km. Basstationsfilen som används för PPK-processen måste täcka hela flygtiden för LiDAR-skanningen.
2. Följ tabellen ovan för att döpa om basstationsfilen korrekt. Det är viktigt att byta både filnamn och filändelse för basstationsfilen. Namnet på basstationsfilen ska vara identiskt och matcha med övriga råfiler från LiDAR-insamlingen. För RINEX-filen ska filändelsen ändras från .YYO till .obs.
3. Kontrollera att den omdöpta basstationsfilen har placerats i samma mapp som den råa LiDAR-datakatalogen. När detta är på plats, importera LiDAR-mappen till DJI Terra för att påbörja bearbetningen. DJI Terra kommer automatiskt att identifiera basstationsfilen och initiera PPK-processen med denna referensdata.
För LiDAR-PPK-arbetsflöden krävs inga ytterligare steg. DJI Terra skriver automatiskt över POS-data under bearbetningen och slutför PPK-korrigeringen sömlöst.
Steg 5: Överskrivning av POS-data i fotogrammetri
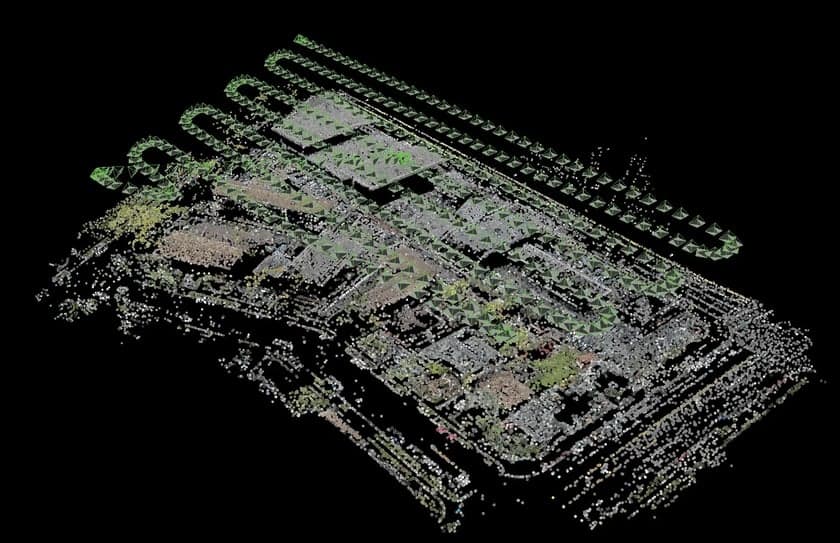
Vid fotogrammetrisk bearbetning används drönarens bild-POS-data (Position and Orientation System) i aerotrianguleringsprocessen för att exakt fastställa varje bilds position och orientering i tredimensionellt utrymme. Aerotrianguleringen innebär att man beräknar de relativa positionerna och orienteringarna mellan bilder baserat på deras överlapp och gemensamma bilddetaljer. POS-datan används för att bestämma varje bilds orientering i 3D, vilket sedan används för att skapa ett glespunktsmoln som representerar det uppmätta området.
Om POS-datan från drönaren är felaktig eller har låg noggrannhet påverkas resultatet av hela den fotogrammetriska processen. Fel i POS-datan kan sprida sig genom aerotrianguleringskedjan, leda till avvikelser vid bundle adjustment och därmed försämra precisionen i slutresultatet.
Noggrannheten i bildens POS-data påverkar direkt den globala noggrannheten i de fotogrammetriska resultaten. PPK-arbetsflödet används för att korrigera dessa fel — som kan uppstå på grund av GPS-drift, brus eller andra sensorrelaterade störningar. Genom att tillämpa PPK-korrigeringar får du betydligt mer exakt POS-data, vilket förbättrar precisionen i det genererade täta punktmolnet, 3D-modellerna och kartorna.
I denna guide används DJI Terra som exempel för att visa hur du tillämpar och överskriver bildens POS-data och bearbetar det råa fotogrammetriprojektet.
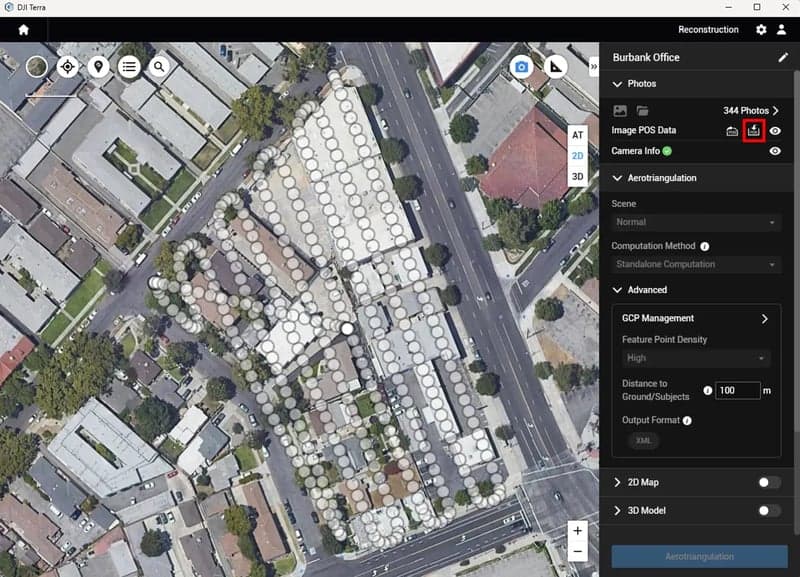
1. Öppna DJI Terra-programvaran, gå till fliken ”Reconstruction”, välj ”New Mission” och därefter ”Visible Light” för att skapa ett nytt fotogrammetriuppdrag. När alla bilder har importerats, välj ikonen ”Import POS Data” enligt bilden nedan.
2. Se till att importera den bearbetade POS-filen i textformat från föregående steg.
3. Efter att POS-datan har importerats visas fönstret ”Format and Properties” automatiskt. I detta fönster ska du justera datakolumnerna och definiera kolumnegenskaperna under avsnittet ”Define Data Column”. Kontrollera att första raden i tabellen innehåller POS-data för den första bilden, och använd verktygen under ”File Format” för att ställa in dataseparatorer samt första raden för datainläsning.
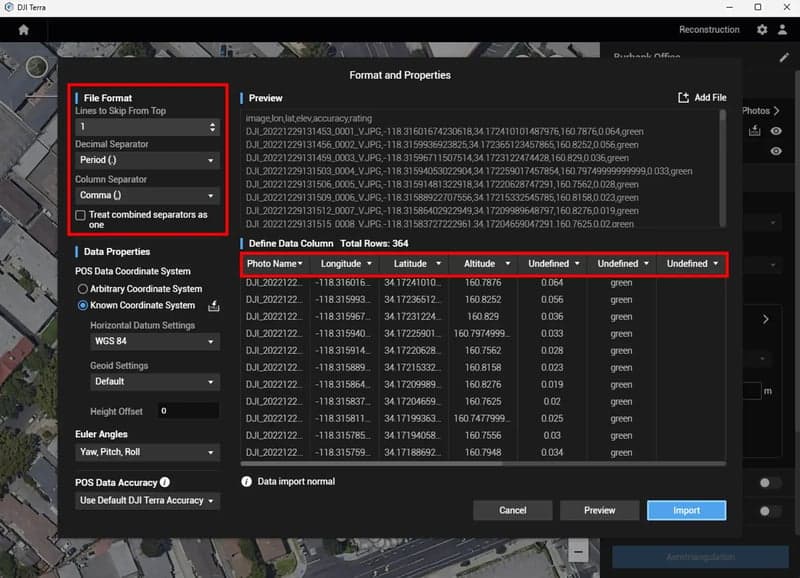
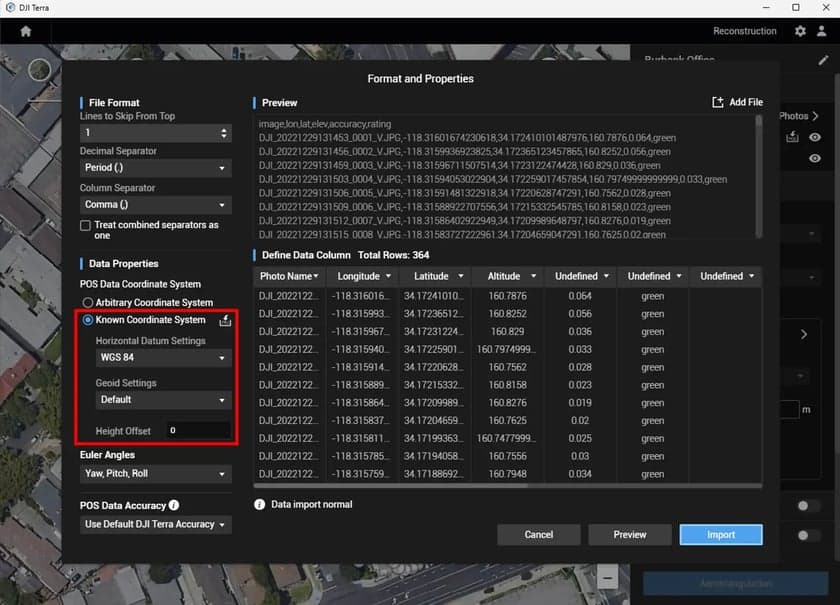
4. För att fortsätta, välj alternativet ”Known Coordinate System” under koordinatsystem för POS-data. Välj sedan motsvarande horisontellt och vertikalt koordinatsystem för den importerade PPK-bearbetade POS-datan. Det är avgörande att rätt koordinatsystem anges för att undvika förskjutningar i resultatet. Om du är osäker på vilket system som ska väljas, kan du kontrollera detta i inställningarna för PPK-programvaran eller i kvalitetrapporten från PPK-processen.
Vanligtvis gäller:
Horisontellt system: WGS84 (EPSG:4326)
Vertikalt system: Ellipsoidisk höjd (i meter, kan ställas in som Default i DJI Terra)
När POS-datan har definierats korrekt, välj ”Import”.
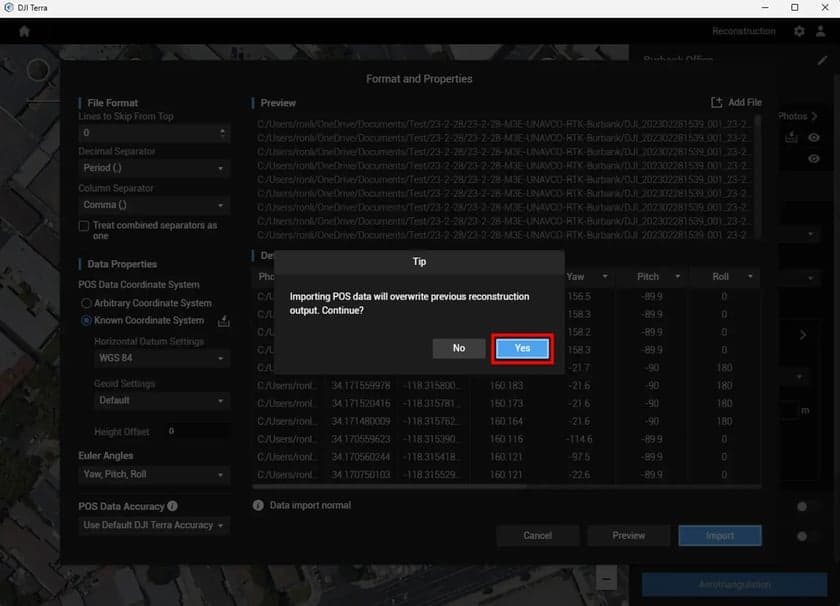
5. För att ersätta den gamla POS-datan som är inbäddad i bilderna med den PPK-korrigerade POS-datan från textfilen, välj ”Yes” för att bekräfta åtgärden i DJI Terra. POS-datan är nu framgångsrikt överskriven.
Slutsats
Noggrann datapositionshantering är grunden för högprecisionskartläggning och inmätning med drönare. PPK-arbetsflödet korrigerar positionsfel i GNSS-data och förbättrar därmed den globala noggrannheten i resultat från både fotogrammetri och LiDAR.
Oavsett om du använder DJI Enterprise-sensorer eller tredjepartsnyttolaster är det avgörande att kunna justera och tillämpa korrigerad POS-data för att uppnå tillförlitliga och konsekventa kartresultat.
Med denna guide och verktyg som DJI Terra kan du bearbeta dina data med förtroende och nå inmätningsexakt noggrannhet. Kom ihåg att verifiera inställningar för koordinatsystem, justera tidsstämplar exakt och säkerställa dataintegritet genom hela arbetsflödet.
Frågor eller funderingar?
Har du några frågor eller funderingar? Tveka inte på att kontakta oss, vi finns här för att svara på alla dina frågor gällande drönare och mätteknik.
E-post: info@swedron.se | Växel: 031 - 712 80 30 (Mån - Fre 09-16) | Chatt: Via hemsidan (Mån - Fre 09-16)