- Vårt sortimentMjukvara för fotogrammetriHörlurar & högtalareNyheter & kampanjer
- Swedron för företag
- Kundservice & Support
- Kurser
- Community








































ctrlk


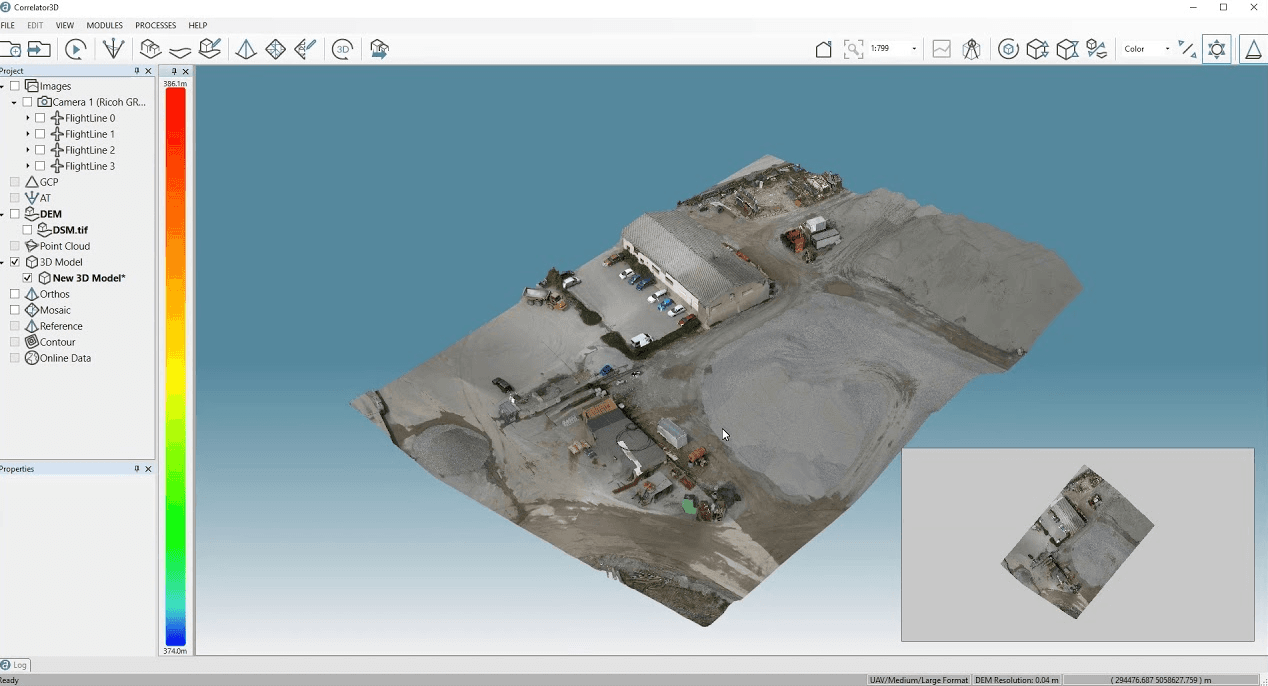
Correlator3D är en kraftfull mjukvara för fotogrammetri som används för att generera högkvalitativa 3D-modeller av geografiska områden från uppsättningar av överlappande flygbilder. Den används inom en rad olika branscher, såsom geomatik, skogsbruk och konstruktion, för att skapa exakta och detaljerade 3D-modeller för ändamål som kartläggning, mätning och visualisering. Med ett användarvänligt gränssnitt och snabb bearbetning på GPU:er och flerkärniga processorer, erbjuder Correlator3D hög noggrannhet och obegränsat antal bilder.
Snabb bearbetning på GPU:er och flerkärniga processorer
Obegränsat antal bilder
Hög noggrannhet
Kraftfullt och användarvänligt gränssnitt
Flexibel modular arkitektur
Universellt arbetsflöde för alla typer av sensorer
Distribuerad bearbetning för ökad hastighet
Correlator3D stöder ett brett utbud av datatyper och format, inklusive flygbilder, satellitbilder och punktmolndata. Den kan bearbeta bilder från en mängd olika källor, inklusive drönare, flygplan och satelliter. Mjukvaran stöder vanliga bildformat som TIFF, JPEG och PNG, samt specialiserade format som multispektrala och hyperspektrala bilder. Dessutom kan Correlator3D bearbeta punktmolndata i LAS-, LAZ- och ASCII-format.
Correlator3D har en flexibel modular arkitektur som innefattar funktioner som flygtriangulering, DSM & punktmoln-generering, DTM-extraktion, orthorektifiering, skapande av fotomosaiker och 3D-modellgenerering.
Flygtriangulering används för att beräkna position och orientering för varje kamera som tog de flygbilder som bearbetas. Denna information används för att skapa en 3D-modell av området genom att triangulera positionerna för punkter på marken i bilderna.
DSM står för "digital ytmodell", vilket är en 3D-representation av ytan för ett område, inklusive föremål och strukturer. Punktmoln-generering är processen att skapa ett punktmoln från flygbilder.
DTM står för "digital terrängmodell", vilket är en 3D-representation av den naturliga markytan för ett område, utan byggnader eller andra konstgjorda strukturer. DTM kan extraheras från DSM genom att ta bort taket på byggnader och andra strukturer.
Orthorektifiering är processen att rätta till förvrängningen i flygbilder orsakade av kamerans position och terrängen. Detta görs genom att använda den 3D-modell som genereras av mjukvaran för att projicera bilderna på en 2D-plan, vilket resulterar i en mer exakt representation av området.
I Correlator3D kan du skapa kombinera flera flygbilder till en enda, sömlös bild.
Använd 3D-modellgenerering för att skapa en 3D-representation av området från flygbilder och andra data som bearbetats av mjukvaran.
Correlator3D erbjuder distribuerad bearbetning, vilket innebär att flera datorer kan arbeta parallellt på ett och samma projekt för att öka bearbetningstiden för stora eller komplexa uppgifter. För att använda distribuerad bearbetning med Correlator3D behöver användarna vanligtvis konfigurera en kluster av datorer eller andra bearbetningsresurser som är anslutna och kan kommunicera med varandra.

För ytterligare information och support kan du besöka följande resurser: