


































Utforska framtidens mätteknik med DJI Enterprise
Denna bloggpost ger dig en djupgående titt på DJI Enterprises banbrytande mätlösningar och avancerade FAQ. Från detaljerade jämförelser av Mavic 3 Enterprise, Zenmuse L1 och Zenmuse P1, till förklaringar om hur du hanterar linsförvrängningsparametrar och bearbetar LiDAR-data, täcker vi allt du behöver veta för att navigera i geospatiala utmaningar med de senaste drönarteknikerna.
Uppdatering 10 oktober 2023 - DJI har släppt Zenmuse L2, läs mer om deras nya LiDAR här:
Lär dig mer om termografi och drönare med vår genomgående heldagskurs
Denna kurs är designad för både nybörjare och erfarna drönarpiloter som vill utöka sina färdigheter och tillämpa termografi i olika sammanhang, inklusive bygginspektioner, energiutvärderingar och räddningsinsatser med mer.

- Heldagskurs i Göteborg
- Grundprinciper för termografi
- Hands-on övningar för datainsamling
- Optimering av inspektionsprocesser
Geospatiala lösningar
Vilka är för- och nackdelarna när man jämför Mavic 3 Enterprise, Zenmuse L1 och Zenmuse P1?
Produkt | Fördelar | Nackdelar |
|---|---|---|
M350 RTK + Zenmuse L1 | - Stark anpassningsförmåga: opåverkad av ljusförhållanden och kan modellera i miljöer med låg textur. - Resultat kan användas för att extrahera en digital höjdmodell (DEM) med genomträngning i vegitation. - Kan enkelt fånga fina strukturer från punktmolnet, såsom transmissionsledningar. • Hög modelleringseffektivitet: en flygning kan täcka en 494 hektar stor plats[1]. | - Noggrannhet relativt beroende på initial POS-status - Ytterligare efterbearbetning av punktmolnsdata krävs med hjälp av programvara från tredje part för att tillhandahålla ett klassificerat punktmoln som kan användas. |
M350 RTK + Zenmuse P1 | - Stöder flera flyglägen: 2D ortofoto, 3D sned, fotografering på nära håll, etc. - Hög drifteffektivitet: en flygning kan generera ortofoto på upp till 365 ha [2] - Hög noggrannhet: Kan uppfylla 1:500 fastighetsmätningsnoggrannhet utan att tillämpa GCP. - Högt antal pixlar: upp till 45 miljoner pixlar med fullformatskamera. | - Kan inte lösa problemet med nattmodellering eller modelleringsområde med låg textur. - Eftersom fotogrammetrilösningar inte kan penetrera vegitation som LiDAR, är de resulterande modellerna begränsade till DSM-resultat och kan inte producera DEM-resultat. – Fotogrammetriprocessen kräver betydligt mer GPU-processorkraft för att utföra aero-triangulering och generera modeller från råbilder. Däremot behöver LiDAR-data bara konverteras till ett universellt format för användning. Därför skulle effektiviteten av datafångst- och bearbetningsfaserna i fotogrammetrilösningen vara lägre jämfört med LiDAR-lösningen. |
Mavic 3 Enterprise | - Låg ingångströskel, mycket kostnadseffektiv; - Liten och bärbar, lätt att använda - Jämfört med Phantom 4 Pro eller Phantom 4 RTK är Mavic 3 Enterprise lättare och mer bärbar, med bättre möjligheter att undvika hinder, längre batteritid och överlägsna kameraspecifikationer. | - Relativt låg drifteffektivitet jämfört med P1 - Lägre kamerapixelantal jämfört med P1 - Inte lämplig för storskalig verksamhet - Nackdelarna med Zenmuse P1 finns också med Mavic 3 Enterprise |
Notera: [1] Flyghastighet på 36 km/h (10 m/s), flyghöjd på 100 m, lateral överlappning på 20 %, datainsamlingstid på 30 minuter, punktmolndensitet större än 200 punkter/m²*. [2] Använda en 35 mm lins, 3 cm GSD, flyguppdragsinställningar: kursöverlappning på 75 %, lateral överlappning på 55 %.
När du jämför fotogrammetrifunktioner mellan dessa kameror:
Mavic 3 Enterprise med RTK-modul (Wide Camera) | Matrice M350 RTK + Zenmuse P1 | Matrice M350 RTK + Zenmuse L1 | |
|---|---|---|---|
Storlek | Liten storlek | Medel storlek | Medel storlek |
Mätningsbetyg | Ja | Ja | Ja |
RTK/PPK Support | Ja | Ja | Ja |
GSD (cm) | H(m)/36.5 | 24mm: H(m)/55 35mm: H(m)/80 50mm: H(m)/120 | H(m)/36.5 |
Sensorstorlek | 4/3"5280 × 3956 (4:3) | Fullformat (35.9×24mm)8192 × 5460 (3:2) | 1-tum 5472 × 3648 (3:2) |
Upplösning stillbilder | 20MP | 45MP | 20MP |
Pixelstorlek | 3.3μm | 4.4μm | 2.4μm |
Linsval | 12mm/24mm Ekvivalent FOV 84,0° | DL 24 mm; FOV 84,0° DL 35 mm; FOV 63,5° DL 50mm; FOV 46.8° | 8.8mm/24mm EquivalentFOV 84.0° |
Mekanisk slutare | Ja (1/2000-8s) | Ja (1/2000-1s) | Ja (1/2000-8s) |
Minsta fotointervall | 0.7s | 0.7s | 2.5s |
Flygtid | Upp till 42 min (med RTK-modul) | Upp till 44 min | Upp till 42 min |
Minneskrav | Max kapacitet: 512GB | Max kapacitet: 512GB | Max kapacitet: 256GB |
Maximalt vindmotstånd | 12 m/s | 12 m/s | 12 m/s |
Smart Oblique Support | Ja | Ja | Nej |
Realtime Terrain-follow | Ja | Nej | Nej |
Support för SDK och tredje parts app | Ja | Ja | Ja |
Hur kommer jag åt parametrarna för linsförvrängning?
För att få åtkomst till linsförvrängningsparametrarna manuellt, öppna ".jpg"-formatbilden som en textfil, sök nyckelordet "DewarpData" under XMP-datafältet. Formatet på texten bör vara liknande: drone-dji: DewarpData = “2023-03-13;3663.4800000000…”
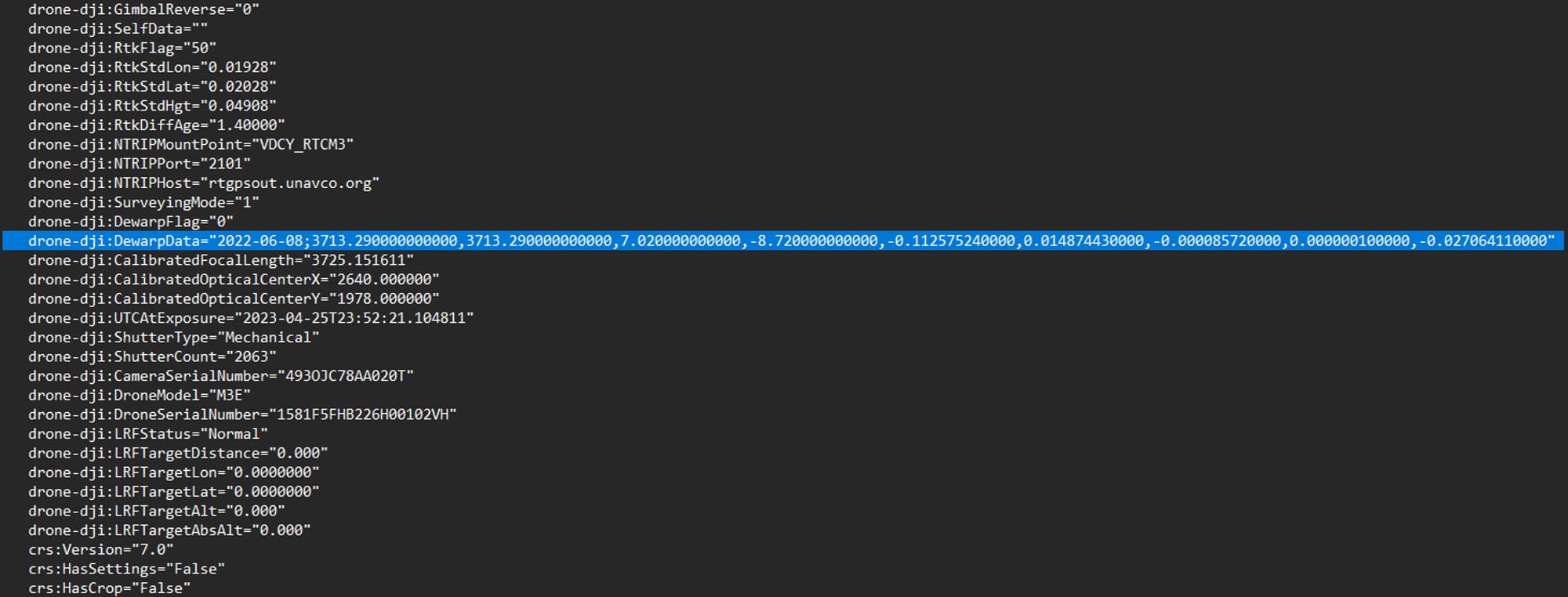
Siffror i följd motsvarar: "calibrate_date;fx,fy,cx,cy,k1,k2,p1,p2,k3" "fx,fy" representerar brännvidden i pixeln "cx,cy" representerar det optiska centrumet uttryckt i pixelkoordinat (ursprungningspunkt som bildens mitt) ”k1,k2, k3” representerar den radiella distorsionen ”p1,p2” representerar den tangentiella distorsionen. För mer information, se följande guide för kamerakalibrering med OpenCV.
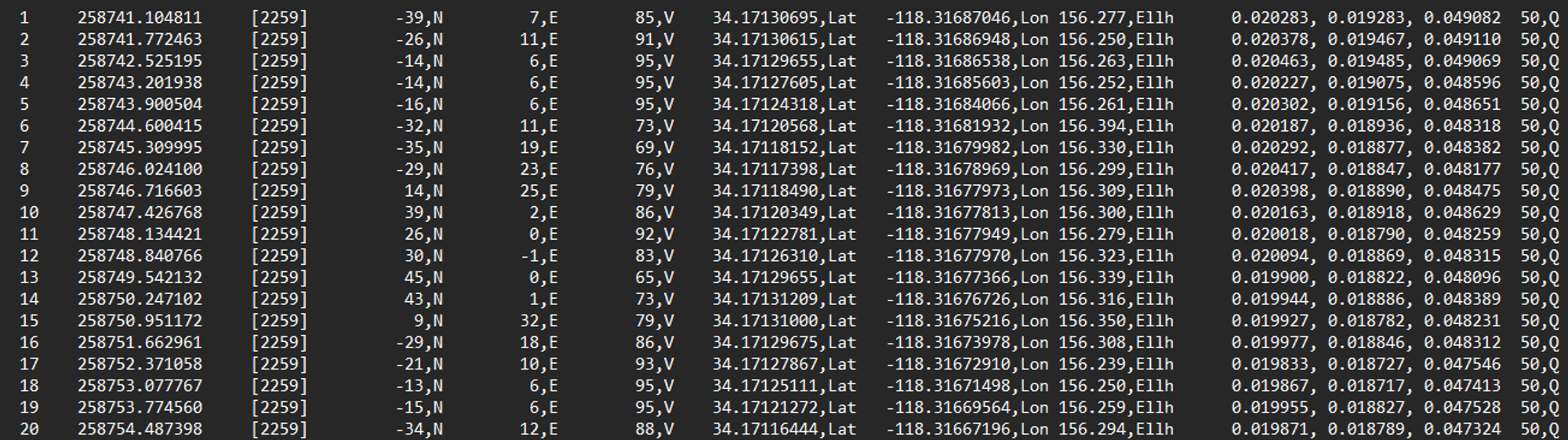
Vad representerar varje datakolumn i filen XXX_Timestamp.MRK?
Kolumn 1: Motsvarande fotonummer
Kolumn 2: GPS:ens exponeringstid, sekunder i veckan (UTC-tid)
Kolumn 3: GPS-veckans exponeringstid (UTC-tid)
Kolumn 4: Faskompensationsvärde mellan den norra antennen (N) till mitten av CMOS-sensorn. (Enhet: millimeter)
Kolumn 5: Faskompensationsvärde mellan den östra antennen (E) till mitten av CMOS-sensorn. (Enhet: millimeter)
Kolumn 6: Faskompensationsvärde mellan den uppåt- och nedåtriktade (nedåt som positiv) antennen (V) till mitten av CMOS-sensorn. (Enhet: millimeter)
Kolumn 7: Realtidslatitud (kolumn 8) och longitud (kolumn 8) för CMOS-centrum erhållna vid exponeringstid, i decimalgrader.
Kolumn 9: Realtidshöjd för CMOS-centrum erhållen vid exponeringstid, i meter. Denna höjd är den geodetiska höjden (allmänt känd som ellipsoidhöjd), i förhållande till standardreferensellipsoidytan (användare kan definiera sin egen ellipsoidmodell, standard är WGS84, användare kan ställa in den på andra ellipsoider genom att komma åt olika CORS-stationssystem/riktmärken, såsom CGCS2000). Observera att denna höjd inte är baserad på det vanliga EGM96/2008 höjdmåttet (ortometrisk höjd) över hela världen.
Kolumn 10 till 12: Standardavvikelse för positioneringsresultat i nord-, öst- respektive uppriktningar, vilket indikerar den relativa noggrannheten för positionering i de tre riktningarna. Enheten är meter.
Kolumn 13: RTK-status, 0-ingen positionering, 16-enpunktspositioneringsläge, 34-RTK flytlösning, 50-RTK fast lösning. När flaggan för ett foto inte är 50, rekommenderas det inte att använda detta foto direkt för kartläggning.
Zenmuse L1
Är det möjligt att använda Ground Control Points (GCP) för att bearbeta LiDAR-data i DJI Terra?
Terra stöder inte GCP-import för LiDAR-data. Men för att tillämpa GCP på L1 LiDAR-data, rekommenderas det att använda programvara från tredje part som TerraSolid UAV-programvara för att applicera GCP på L1 LiDAR-data.
Vilket är datautmatningsformatet för Zenmuse L1 förutom LAS?
PNTS, PLY, PCD, S3MB
Är det möjligt att behandla L1-rådata utan en RTK-anslutning? Kan Zenmuse L1 rådata bearbetas under en vanlig GPS-flygning?
Ja, du kan bearbeta L1-rådata utan en RTK-anslutning. Du måste dock lägga till en basstationsobservationsfil (Rinex-, RTCM-, OEM- eller UBX-fil) till L1-rådatamappen tillsammans med resten av rådata för att korrekt bearbeta och mata ut punktmolnsfilen i DJI Terra. Denna process kallas post-process kinematic (PPK). För mer information om denna process, se driftguiden, specifikt sidan 11: https://dl.djicdn.com/downloads/Zenmuse_L1/20230420/DJI_L1_Operation_Guidebook_V1.2.pdf
Är det möjligt att slå samman data från flera flygningar med Zenmuse L1 till ett enda punktmoln i DJI Terra?
Ja, du kan importera flera rådatamappar som samlats in från L1-flygningar, kryssa för alternativet "Merged Output" och utgångspunktmolnet till en LAS-fil med Terra.
Vad är skillnaden mellan enkel, dubbel och trippel retur och vilka är de bästa metoderna för att använda dessa?
Return/Echo Mode: Indikerar att lidar kan ta emot flera returer efter att ha avfyrat en laserstråle. Enkelreturläge innebär att en laserpunkt skjuts och LiDAR kan ta emot högst en retur. Dubbelt returläge innebär att en laserpunkt skjuts och LiDAR kan ta emot högst två returer. Trippelreturläge innebär att LiDAR kan ta emot högst tre returer för varje laserpunkt. Om endast ytinformation eller DSM behövs räcker det med enkel returläge. Men i scenarier som skogsmätning som kräver vegitationsgenomträngning och DEM-data, är dubbel eller trippel returläge nödvändigt.
Kan Zenmuse L1 monteras på den dubbla nedåtriktade eller uppåtriktad gimbalfästet på M350/M300 RTK?
Nej. Zenmuse L1 kan endast monteras på det enda nedåtriktade gimbalfästet på M300/M350 RTK. Om du använder den på det dubbla nedåtriktade fästet eller det uppåtriktade skulle gimbalfästet vara annorlunda och den fördefinierade platsen fel, så att noggrannheten skulle påverkas.
Zenmuse P1
Kommer Zenmuse X7-objektivet att fungera på Zenmuse P1?
Endast 24 mm, 35 mm och 50 mm. 16mm fungerar inte med P1 på grund av sensorstorlek. Noggrannheten kommer att uppfylla kraven på undersökningsgrad efter korrekt kalibrering. Kan använda DJI Terra-mjukvaran för att kalibrera och skriva över nya linsparametrar för första gången, procedur nedan.
Jag bytte ett Zenmuse P1-objektiv och nu är alla kameralinsens distorsionsparametrar föråldrade, hur kalibrerar jag om de lagrade parametrarna med ett nytt objektiv?
För att kontrollera om P1-objektivet är korrekt kalibrerat, öppna först P1.jpg-fotot som en textfil och sök efter XMP-datafältet "DewarpData". Om det här fältet inte finns i listan är objektivet inte korrekt kalibrerat. För att kalibrera om linsens distorsionsparametrar, följ proceduren nedan:
Samla in kalibreringsdata Det rekommenderas att kalibrera i områden med stora höjdskillnader som byggnader eller sluttningar. Använd Smart Oblique Capture eller Oblique Mission (fem rutter) för att planera uppdraget. Parameterkrav: De insamlade bilderna ska vara mer än 100, den frontala överlappningsfrekvensen ska vara minst 80 % och sidoöverlappningen ska vara minst 70 %, den sneda bilden står för minst 2/3. (Ingen gräns för flyghöjd) Slå på RTK och slå av efter RTK FIX.
Modellering: Använd DJI Terra v2.3.1 och senare version för att skapa ett nytt 3D-rekonstruktionsuppdrag och börja modellera
Kalibrering När modelleringen är klar, öppna mappen, hitta filen sfm_report.json i AT-rapportkatalogen och kopiera den till kamerans SD-kort; Sätt i SD-kortet i P1-kameran och anslut till drönaren och slå på strömmen. Sedan kommer kameran automatiskt att skriva de interna parametrarna efter kalibrering. Ta en bild, öppna den med Notepad och sök efter XMP. Om du kan hitta DewarpData betyder det att kamerans interna parameterkalibrering har lyckats.
Kan Zenmuse P1 monteras på det dubbla nedåtriktade eller det uppåtriktade gimbalfästet på M350/M300 RTK?
Nej. Zenmuse P1 kan endast monteras på det enda nedåtriktade gimbalfästet på M300/M350 RTK. Om du använder den på det dubbla nedåtriktade eller det uppåtriktade skulle positioneringen vara annorlunda än den fördefinierade platsen så att noggrannheten skulle påverkas.
DJI Terra
Finns det ett fotogrammetribehandlingsprogram som kan sätta samman och konvertera drönarbilder till en 2D-karta eller en 3D-modell?
Ja, du kan använda programvaran DJI Terra för detta ändamål. DJI Terra kan mata ut digital ytmodell (DSM) och sann digital ortofotokarta (TDOM) i geotiff-format och 3D mesh- eller punktmolnmodeller.
Vilken programvara rekommenderas för att bearbeta bilderna till en ortofotokarta och för att producera de digitala ytorna?
Det är rekommenderat att du använder DJI Terra för offlinebearbetning, eller en programvara från tredje part som passar dina behov.
Vad ska jag se till innan jag bearbetar drönarbilder i DJI Terra?
Inom kamerainställningarna, se till att alternativet "mekanisk slutare" är aktiverat och alternativet "dewarping" är inaktiverat före flygningen. Om du använder PPK, se till att dina bildpositionsdata är korrekta. För RTK är det inget extra du behöver göra med bilderna.
Vilka ytterligare bearbetningsändringar kan tillämpas på den importerade drönarbilddatan inom Terra?
Vid bearbetning med Terra finns det inga inställningar för att justera färgkoncentration, exponering och andra egenskaper. Användare kan bara ändra bildens POS-data, som inkluderar koordinatsystem och Euler-vinklar. Däremot tillhandahåller DJI Terra ytterligare funktionalitet, såsom reducering av punktmoln, förfina vattenyta och ljuslikformighet, för att säkerställa kvaliteten på rekonstruktionen.
Hur kan du minimera suddiga bilder som tagits från drönare under flygning?
Rekommenderar att ställa in slutartiden snabbare än 1/500s, aktivera den mekaniska slutaren, ställ in ISO på automatisk och justera bländaren på motsvarande sätt.
Är GPS/IMU-informationen bifogad till fotometadatafältet?
Ja, du kan också kolla vår P1-manual sida 22-23 för mer information om XMP-metadatafältet: Zenmuse_P1 _User Manual_EN_v1.2_3.pdf (djicdn.com)
Kan LiDAR-data som behandlas i DJI Terra kalibreras/klassificeras?
Ingen klassificering annat än mark. Terra har också grundläggande funktioner för att reducera brus och tunna ut punktmolnet.
Finns Zenmuse L1-bandata i en separat fil från LAS-punktmolnet?
Ja, det matas ut i formatet "sbet.out" under Terra-projektets resultatmapp.
Zenmuse L1 LiDAR-sensorn har också en RGB-kamera, är utdata ett färgat punktmoln?
Foton kan tas samtidigt som råa punktmolndata. Dessa foton kan användas för fotogrammetribehandling eller punktmolnfärgning.
Terra kommer att konvertera data till ett LAS-punktmoln men vilken version av LAS v1.2 eller 1.4?
LAS v1.2
Vilket är det rekommenderade arbetsflödet för Zenmuse L1?
Se DJI L1 Operations Guidebook som finns på sidan L1 Nedladdningar.
Hur matar man ut fotogrammetriprojektet i ett känt koordinatsystem?
Under alternativet "Avancerat" - "utgångskoordinatsystem" - "Känt koordinatsystem" - välj det kända koordinatsystemet från "Horizontala datuminställningar" och "Geoidinställningar".
Terra-listan över kända koordinatsystem har inte det koordinatsystem jag behöver. Hur ställer man in det?
Om du har koordinatsystemets projektionsfil för koordinatsystemet i formatet ".prj", Under "Avancerat" alternativ - "utgångskoordinatsystem" - "Känt koordinatsystem" - klicka på PRJ-importikonen och välj att importera koordinatsystemet i PRJ-format.
Om målkoordinatsystemet använder ett anpassat kartesiskt system, kan du transformera TDOM/Model-resultatet till det anpassade kartesiska systemet med hjälp av transformationsverktyget med sju parametrar. Se sidan 29 i Terra användarmanual för detaljerade instruktioner om denna process. https://dl.djicdn.com/downloads/dji-terra/20230525/DJI_Terra_User_Manual_v3.7_EN.pdf
Om utmatningsfelet är betydligt större vid val av vertikalt koordinatsystem, hur ska det hanteras?
Det vertikala koordinatsystemet i Smart Map använder endast allmänt tillgänglig information om vertikala koordinatsystem. Vänligen bekräfta om höjdfilen har lagts till. För specifik information, besök webbplatsen https://cdn.proj.org/.
Om det vertikala koordinatsystemet som används inte har en höjdfil tillagd, och höjdavvikelsefilen för det området inte är offentlig, rekommenderas att förbättra höjdnoggrannheten genom att lägga till fler GCP:er.
Terrain Follow
Hur kan du använda Terrain Follow-funktionen i Pilot 2-appen?
Det finns flera sätt att planera terrängföljningsflygningar i Pilot-appen.
ASTER GDEM V3 30m modell är inbyggd i Pilot-appen som tillval. Välj kartuppdrag, aktivera Terrain Follow, välj DSM-fil och välj sedan att ladda ner från internet.
Importera DSM/DEM i TIFF-format till Pilot, välj kartläggningsuppdrag, aktivera Terrain Follow, välj DSM-fil och välj sedan TIFF för att importera terrängmodell.
Terrängfölj i realtid (endast tillgängligt på Mavic 3 Enterprise, Thermal och Multispectral). Här är en snabb sammanfattning som förklarar Terrain Follow-funktionens kompatibilitet med olika uppdragslägen:
2D Mapping | Smart Oblique | Oblique | Linear | |
|---|---|---|---|---|
M3E DSM Following | Ja | Ja | Ja | Ja |
M3E Real-Time Terrain Following | Ja | Ja | Nej | Ja |
M3T DSM Following | Ja | Nej | Ja | Ja |
M3T Real-Time Terrain Following | Ja | Nej | Nej | Ja |
M30 DSM Following | Ja | Nej | Ja | Ja |
M300 RTK DSM Following | Ja | Ja (bara med Zenmuse P1) | Ja | Ja |
Varför kan jag inte importera en WGS84 DSM tiff-fil till Pilot 2-appen?
Använd Geodetic WGS84 istället för den projicerade WGS84. Pilot 2 känner bara igen EPSG 4326 Geodetic WGS84 DEM/DSM.
Fotoformat och kamerainställningar
Vilka fotoformat finns för kamerorna Mavic 3 Enterprise, Zenmuse P1 och Zenmuse L1?
L1: JPG
P1: JPG+DNG
Mavic 3 Enterprise: JPG+DNG
Vilka inställningar för kameraingång kan ändras?
Inställningar för kameraläge (Auto, S, A, M), ISO, Bländare, Slutartid, Exponeringsvärden, Fokusläge (AF/MF).
Kan Zenmuse P1-sensorn fota stora/små tiff 8/16 bitar?
Nej, men Zenmuse P1 matar ut råformat i DNG
Vilka är några rekommenderade kamerainställningar för Mavic 3 Enterprise, Mavic 3 Multispectral och Zenmuse P1 när du utför fotogrammetriuppdrag?
För Mavic 3 Enterprise Camera Settings:
Se till att inaktivera "dewarping"-inställningen
Se till att aktivera inställningen "Mekanisk slutare".
Välj "MF" som fokusläge och ställ in fokus på oändlighet
Välj "Auto" för kamerainställningsläget
Om du vill ställa in kamerainställning manuellt för fotogrammetriuppdrag rekommenderas följande:
Ställ in ISO på auto
Ställ in slutartiden på 1/1000s eller snabbare för att undvika rörelseoskärpa (mekanisk upp till 1/2000s)
Ställ in EV på 0
Ställ in AE mellan 5,6 till 11
För Zenmuse P1-kamerainställningar:
Se till att inaktivera "dewarping"-inställningen
Se till att aktivera inställningen "Mekanisk slutare".
Välj "MF" som fokusläge och ställ in fokus på oändlighet
Välj "M" för kamerainställningsläget
Ställ in Auto ISO
Ställ in bländaren manuellt baserat på det omgivande ljuset. Se till att ställa in bländaren mellan 5,6-11
Ställ in slutartid på 1/500s eller snabbare för att undvika rörelseoskärpa (mekanisk upp till 1/2000s)
Vad är alternativet för "dewarping" i Pilot 2-appens kamerainställningar, och ska jag aktivera det?
Aktivering av dewarping kalibrerar den optiska distorsionen som orsakas av kameralinsen, med realtidskalibrerade bilder som tas och lagras på Micro-SD-kortet. Att inaktivera distorsionskorrigering innebär att kameran tar en oredigerad bild med en fisheye-effekt. Linsförvrängningsparametrarna för Zenmuse P1, Zenmuse L1, Mavic 3 Enterprise vidvinkelobjektiv, Mavic 3 Multispectral vidvinkelobjektiv och Phantom 4 RTK är alla fabriksuppmätta. Dessa unika parametrar sparas i "DewarpData" under XMP-fältet för varje bild som tas. De känns igen automatiskt när dessa bilder importeras till DJI Terra-programvaran. Men för fotogrammetrimjukvara från tredje part kan användaren manuellt mata in dessa parametrar för att kalibrera bildförvrängningen. Eftersom distorsionskalibrering med hjälp av efterbearbetningsprogram med kamerans dewarp-parametrar har mycket bättre noggrannhet jämfört med den inbyggda distorsionskorrigeringsfunktionen i Pilot 2-appen, rekommenderar vi att du inaktiverar det här alternativet för mätningsändamål.
RTK/PPK
Vilket koordinatsystem skrivs till geotaggarna på bilden? Är det alltid i geodetisk WGS84?
Nej, bildernas koordinatsystem beror på NTRIP RTK-korrigeringskällan och kanske inte alltid faller under WGS84. Om du använder mobilstationen D-RTK2 som RTK-källa, skulle det horisontella koordinatsystemet vara i WGS84 EPSG:4326 och det vertikala koordinatsystemet i ellipsoidal höjd. I Terra måste du definiera systemet när du importerar bilder; Annars kommer Terra alla bildkoordinatsystem som standard att vara horisontella i WGS84 (EPSG:4326) och vertikala i ellipsoidal höjd.
Hur kan du använda en tredjeparts RTK-bas med DJI Enterprise-drönare?
För tredjeparts RTK-basstationer måste du först konfigurera NTRIP-tjänstsändningen och se till att RTK-basen såväl som M3M RC är under samma Wi-Fi-nätverk och sedan under Pilot-appen - RTK-inställningssidan se till att mata in autentiseringsuppgifter för att konfigurera NTRIP-anslutningen. Du kan hitta mer information på manualsidan 46: https://dl.djicdn.com/downloads/DJI_Mavic_3_Enterprise/20230404/DJI_Mavic_3E_3T_User_Manual_EN.pdf
Är det nödvändigt att initiera D-RTK2-basstationen på en känd plats före användning?
Svaret på denna fråga beror på om du använder RTK för högprecisionspositionering och bara bryr dig om relativ noggrannhet eller om du använder RTK för dataregistrering med hög global noggrannhet som t.ex. undersökningsarbeten. I det första scenariot är svaret nej, medan i det andra scenariot är svaret ja.
Kan en DJI Enterprise-drönare med RTK anslutas till en tredje parts NTRIP-prenumerationstjänst?
Ja, en DJI Enterprise RTK-aktiverad drönare kan ansluta direkt till en NTRIP-tjänst som Swepos. Detta gör det enkelt att ställa in tjänsten.
På en ny plats där det inte finns några kända punkter för att sätta upp en D-RTK2-basstation, hur kan vi säkerställa god noggrannhet för insamlade data?
Om en NTRIP-tjänst är tillgänglig kan du ansluta till internet och använda RTK via en NTRIP-caster, så länge baslinjen (avståndet mellan drönaren och NTRIP-castern) inte är för långt borta. Om internet inte är ett alternativ kan du överväga att använda ett PPK-arbetsflöde för att efterbehandla basstationsdata, såväl som drönarbilddata, istället för att använda RTK. Läs mer om PPK här.
Vilka RTCM-meddelandetyper stöds av DJI Enterprise RTK-aktiverade drönare?
Se följande diagram för att hitta de RTCM-meddelandetyper som stöds som motsvarar drönarmodellerna:
Drönare | RTK-modul | RTK-tjänst | NTRIP-protokoll som stöds RTCM-meddelandetyp |
|---|---|---|---|
Matrice M300 RTK Matrice M350 RTK | Dubbla RTK-antenner | Custom Network RTK (NTRIP) DJI D-RTK 2 | RTCM 3.0, RTCM 3.1, RTCM 3.2, RTCM 33_GRC, RTCM 33_GRCE |
Matrice M30 Matrice M30T | Dubbla RTK-antenner | Custom Network RTK (NTRIP) DJI D-RTK 2 | RTCM 3.0, RTCM 3.1, RTCM 3.2, RTCM 33_GRC, RTCM 33_GRCE |
Mavic 3 Enterprise Mavic 3 Thermal Mavic 3 Multispectral | Valbar (RTK-modul säljs separat) | Custom Network RTK (NTRIP) DJI D-RTK 2 | RTCM 3.0, RTCM 3.1, RTCM 3.2, RTCM 33_GRC, RTCM 33_GRCE |
Phantom 4 RTK | Enkel RTK-antenn | Custom Network RTK (NTRIP) DJI D-RTK 2 | RTCM 3.0, RTCM 3.1, RTCM 3.2, RTCM 33_GRC |