


































Utforska LiDAR-teknikens revolutionerande potential
LiDAR-teknologin, med sin förmåga att skapa detaljerade tredimensionella kartor genom att mäta hur lång tid det tar för laserpulser att reflektera tillbaka från ytor, representerar en spännande framtid för geospatial datainsamling. Denna teknik är särskilt värdefull inom områden som skogsbruk, stadsplanering och miljövetenskap, där den kan erbjuda ovärderlig insikt och precision. Genom att djupdyka i LiDAR:s principer och dess integrerade komponenter, ger detta blogginlägg en omfattande förståelse för hur teknologin fungerar och dess potentiella applikationer.
Lär dig mer om termografi och drönare med vår genomgående heldagskurs
Denna kurs är designad för både nybörjare och erfarna drönarpiloter som vill utöka sina färdigheter och tillämpa termografi i olika sammanhang, inklusive bygginspektioner, energiutvärderingar och räddningsinsatser med mer.

- Heldagskurs i Göteborg
- Grundprinciper för termografi
- Hands-on övningar för datainsamling
- Optimering av inspektionsprocesser
Innehållsförteckning / Introduktion för Blogginlägget: "LiDAR-teknologi: En djupdykning i dess principer och applikationer"
1. Introduktion till LiDAR-teknologin
Förståelse av LiDAR (Light Detection and Ranging)
Grundprinciper för LiDAR: Emission, Reflektion och Detektion
2. LiDAR vs. Fotogrammetri
Jämförelse av LiDAR och fotogrammetri
Idealiska applikationer för LiDAR och fotogrammetri
3. Komponenter i ett Integrerat Luftburet LiDAR-System
Hårdvarukomponenter
LiDAR-system: Modul, laserljuskälla, mottagare, optiska komponenter, elektronisk styrenhet
GNSS-mottagare och IMU
UAV-systemet
Programvarukomponenter
Planeringsmjukvara för flyguppdrag
Flygövervakning och kontrollprogramvara
Programvara för punktmolnsbearbetning
4. Nyckelterminologier och Kunskap inom LiDAR
Reflektivitet på olika ytor
Punktmoln färgat av ytreflektivitet
LiDAR-skanningsmetoder: Repetitiv och Icke-repetitiv
Våglängd och detektionsområde
Flera returer: Första, Mellan och Sista
Relaterade applikationer
5. Tekniska Aspekter av LiDAR
Stråldivergens och dess inverkan
Samplingshastighet och IMU-kalibrering
Faktorer som påverkar prestanda: Densitet, flygstråk och rådataverifiering
LAS Point Cloud Format och Punktmolnfärgning
Flygbana och dess betydelse i LiDAR-databehandling
6. DJI LiDAR PPK Process och dess Arbetsflöde
Allmänt arbetsflöde för PPK-processen
Bearbetning av råa LiDAR-data
Nyckelfunktioner i DJI Terra-programvara för LiDAR-bearbetning
7. Applikationer av Luftburen LiDAR
Skogsförvaltning och volymmätning
Topografisk undersökning och arkeologisk forskning
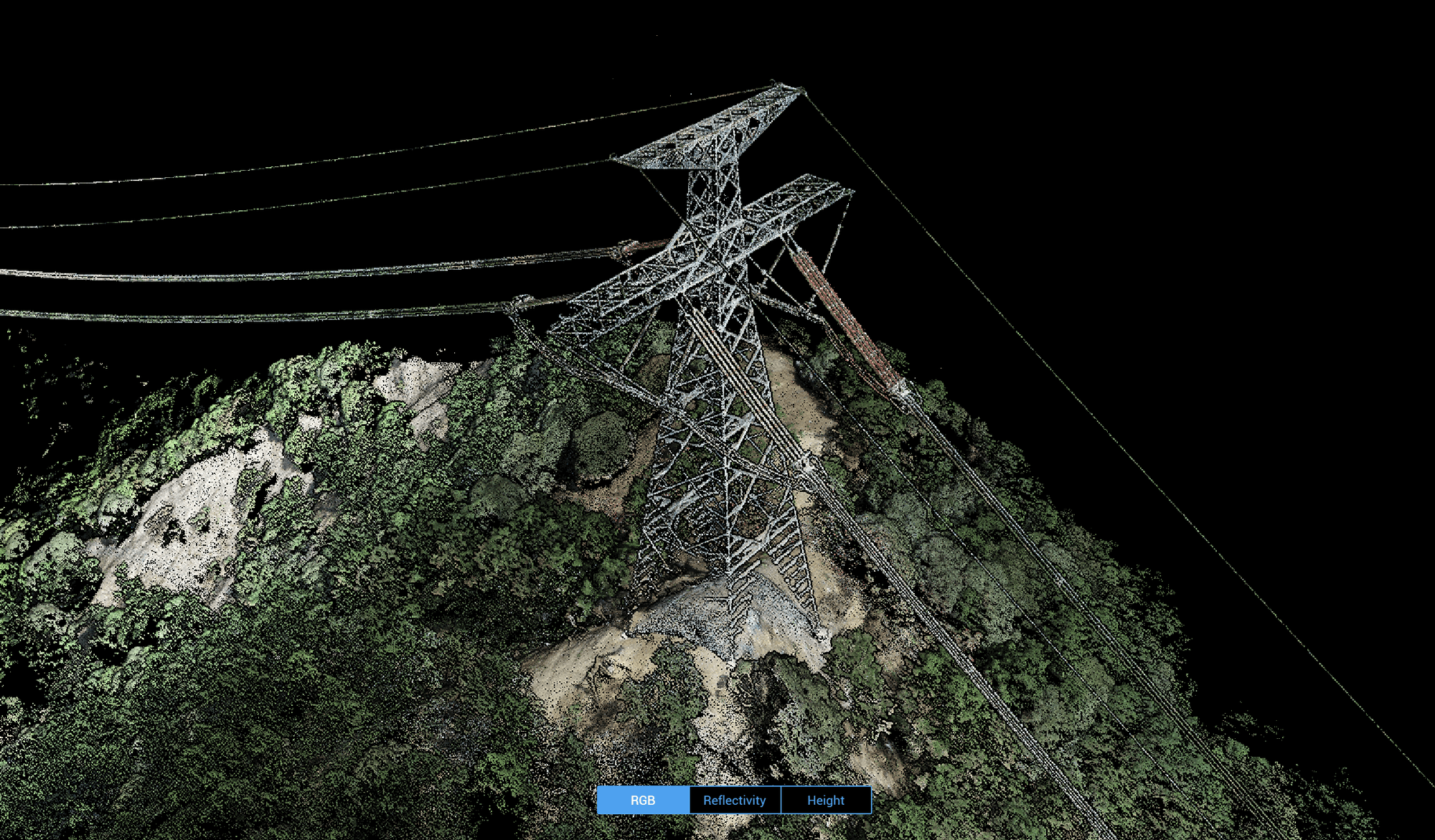
Inspektion av elledningar och infrastrukturinspektion
Sammanfattning
Översikt av LiDARs roll i olika industrier
Framtidsperspektiv och utveckling inom LiDAR-teknologin
Introduktion och principer för LiDAR-teknologi
Vad är LiDAR?
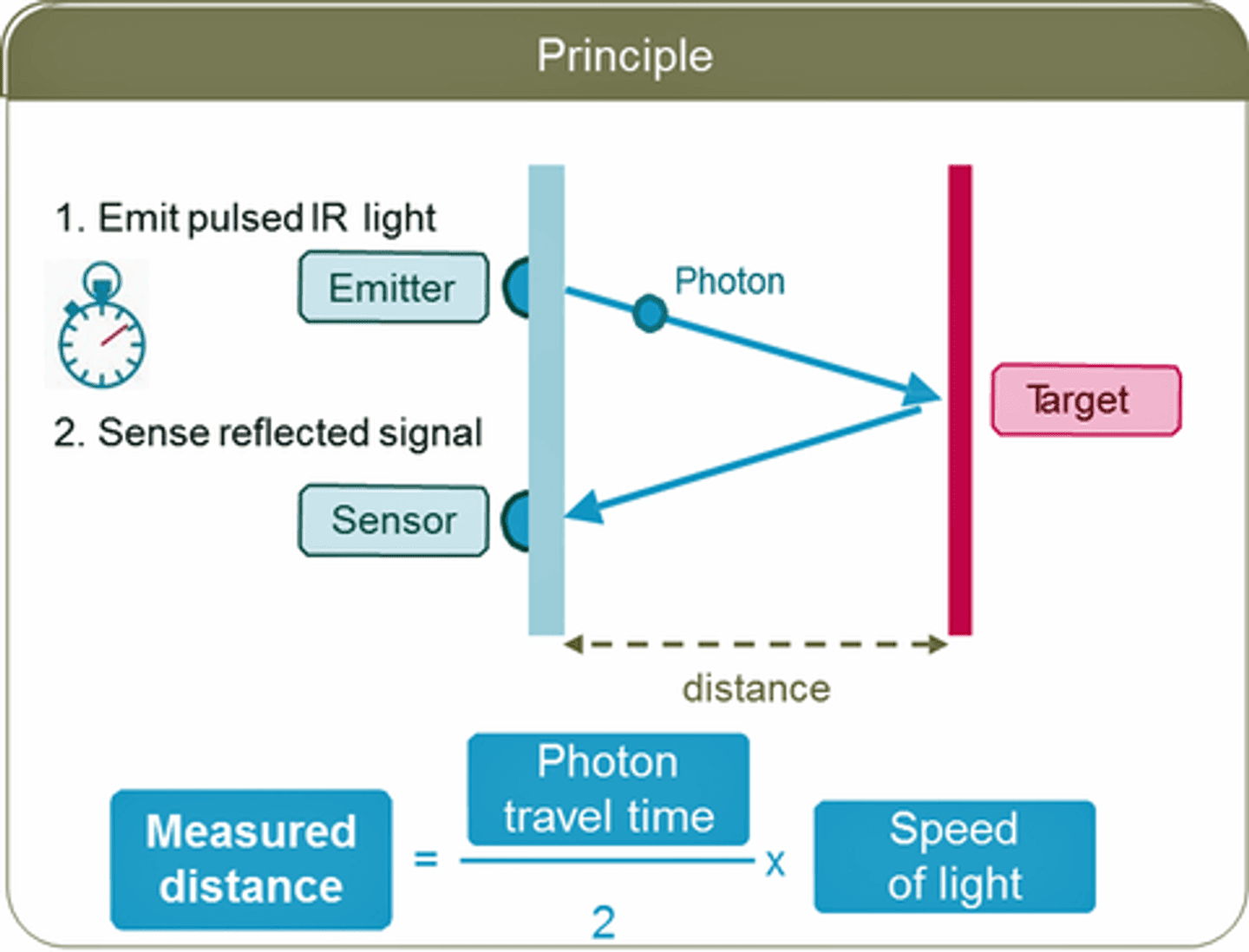
LiDAR står för Light Detection and Ranging och är en fjärravkänningsteknik som använder snabba laserpulser för att kartlägga målets yta. Genom att sända ut en laserstråle och mäta tiden det tar för ljuset att reflektera tillbaka från föremål skapar LiDAR detaljerade tredimensionella punktkartor. Föreställ dig att du är i ett helt mörkt rum med en ficklampa. Riktar du ficklampan mot olika föremål kommer ljuset att studsa tillbaka, och genom att se det ljuset kan du få en uppfattning om var saker finns och hur långt bort de är. Ju fler gånger du lyser med ditt ljus och från olika vinklar, desto bättre uppfattning får du om rummets layout. LiDAR fungerar på liknande sätt men istället för att använda synligt ljus som en ficklampa, använder det osynligt laserljus. Så här fungerar det:
Emission: LiDAR-enhet skickar ut en snabb puls av laserljus mot ett föremål.
Reflektion: Ljuset reflekteras sedan från föremålet och återgår till LiDAR-sensorn.
Detektering: Enheten mäter den tid det tog för ljuset att återvända. Eftersom ljusets hastighet är konstant kan denna varaktighetstid användas för att beräkna avståndet mellan LiDAR-sensorn och målobjektet.
LiDAR vs. fotogrammetri
LiDAR-systemet mäter data, medan fotogrammetrisystemet beräknar det. Denna nyckelskillnad gör dem bättre lämpade för olika applikationer. LiDAR använder laserpulser för att mäta verkligheten, vilket gör den idealisk för applikationer som kräver absolut datasäkerhet. LiDAR kan tränga igenom vegetation och påverkas inte av ljusförhållanden, vilket gör det till ett utmärkt alternativ för att kartlägga skogar eller andra områden med tät vegetation. LiDAR är också användbart för att skapa exakta terrängmodeller och topografiska kartor. Fotogrammetri använder kameror för att ta överlappande bilder av ett område, som sedan sys ihop för att skapa en 3D-modell eller ortokarta. Det är billigare än LiDAR och kan användas med hårdvara "från hyllan" som alla drönare och kameror. Detta gör det användbart för att skapa mycket detaljerade modeller av byggnader och infrastruktur, såväl som högupplösta ortokartor för inspektion och övervakningstillämpningar.
Vilka är komponenterna i ett integrerat luftburet LiDAR-system?
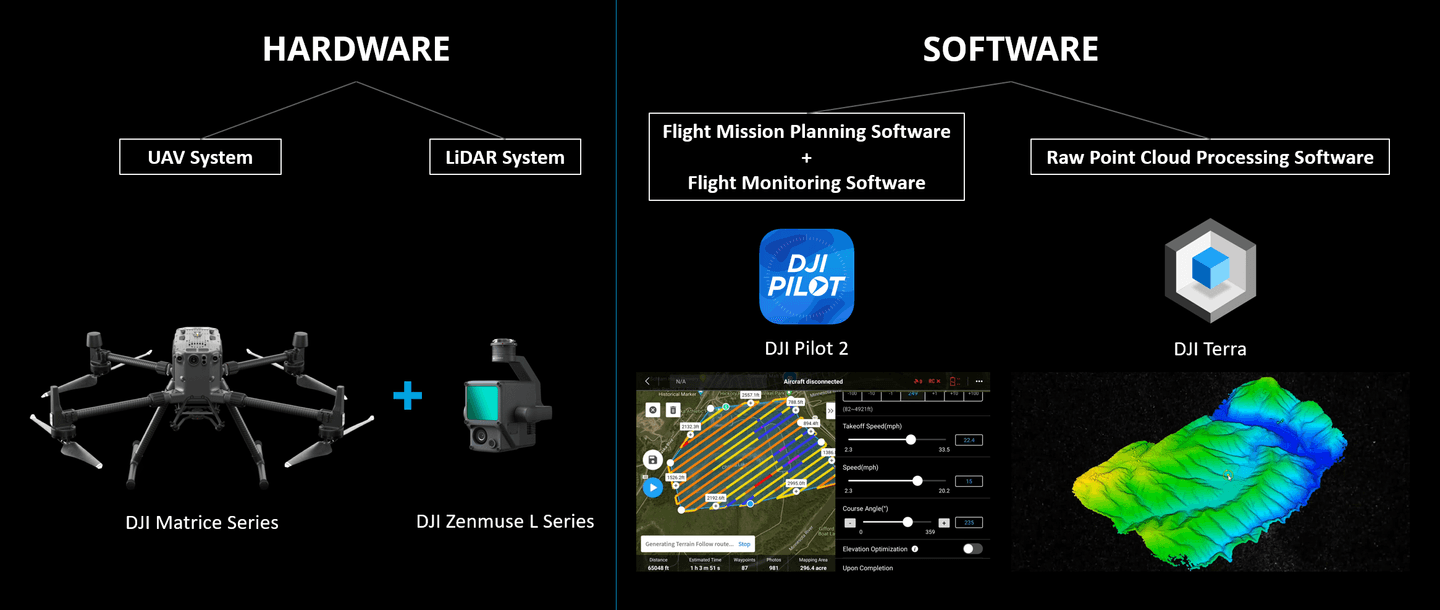
Hårdvarukomponenter
LiDAR System
LiDAR-modul: Den viktigaste komponenten i LiDAR-systemet, lasermodulen genererar en pulsad laserstråle som är riktad mot målytan. Lasermodulen består av flera komponenter, inklusive laserljuskällan, mottagaren, optiska komponenter och den elektroniska styrenheten.
Laserljuskälla: Den genererar korta pulser av laserljus som används för att mäta avståndet mellan LiDAR-sensorn och föremål i omgivningen.
Mottagare: Den upptäcker det reflekterade laserljuset och omvandlar det till en elektronisk signal som kan bearbetas av LiDAR-systemet.
Optiska komponenter: Dessa komponenter är ansvariga för att rikta och fokusera laserstrålen mot målytan och samla in det reflekterade ljuset.
Elektronisk styrenhet: Den styr tidpunkten och varaktigheten för laserpulserna och bearbetar signalerna från mottagaren.
GNSS-mottagare (Global Navigation Satellite System) används för att ge exakt georeferens för skannade LiDAR-resultat. De flesta UAV LiDAR-system använder antingen sitt eget individuella GNSS-system för att logga satellitdata för georeferens och efterbearbetning eller är integrerade med DJI PSDK och använder GNSS-systemet från drönarsystemet.
IMU (Inertial Measurement Unit). Det är en enhet som mäter accelerationen och vinkelhastigheten för ett LiDAR-system. Genom att integrera dessa mätningar över tid kan IMU bestämma LiDAR-systemets position, hastighet och vinkel i tredimensionellt rymd. Denna information används för att korrigera för eventuella rörelser eller vibrationer i LiDAR-systemet under datainsamlingsprocessen.
INS (Inertial Navigation System) använder rådata från en IMU och integrerar den för att tillhandahålla position, hastighet och orienteringsinformation för ett objekt i förhållande till en känd startpunkt, orientering och hastighet. INS tar IMU-data och integrerar den med GNSS-positioneringsinformation för att ge en kontinuerlig uppskattning av LiDAR-sensorns position och orientering under datainsamlingen.
UAV System
UAV eller obemannat luftfartyg. Den används för att flyga LiDAR-systemet över området som undersöks, och den kan utrustas med ett eget GNSS- och RTK/PPK-system för noggrann georeferens av LiDAR-systemet. För Swedrons LiDAR-arbetsflöden används plattformar som Matrice 4E, Matrice 4T och Matrice 400.
Programvarukomponenter
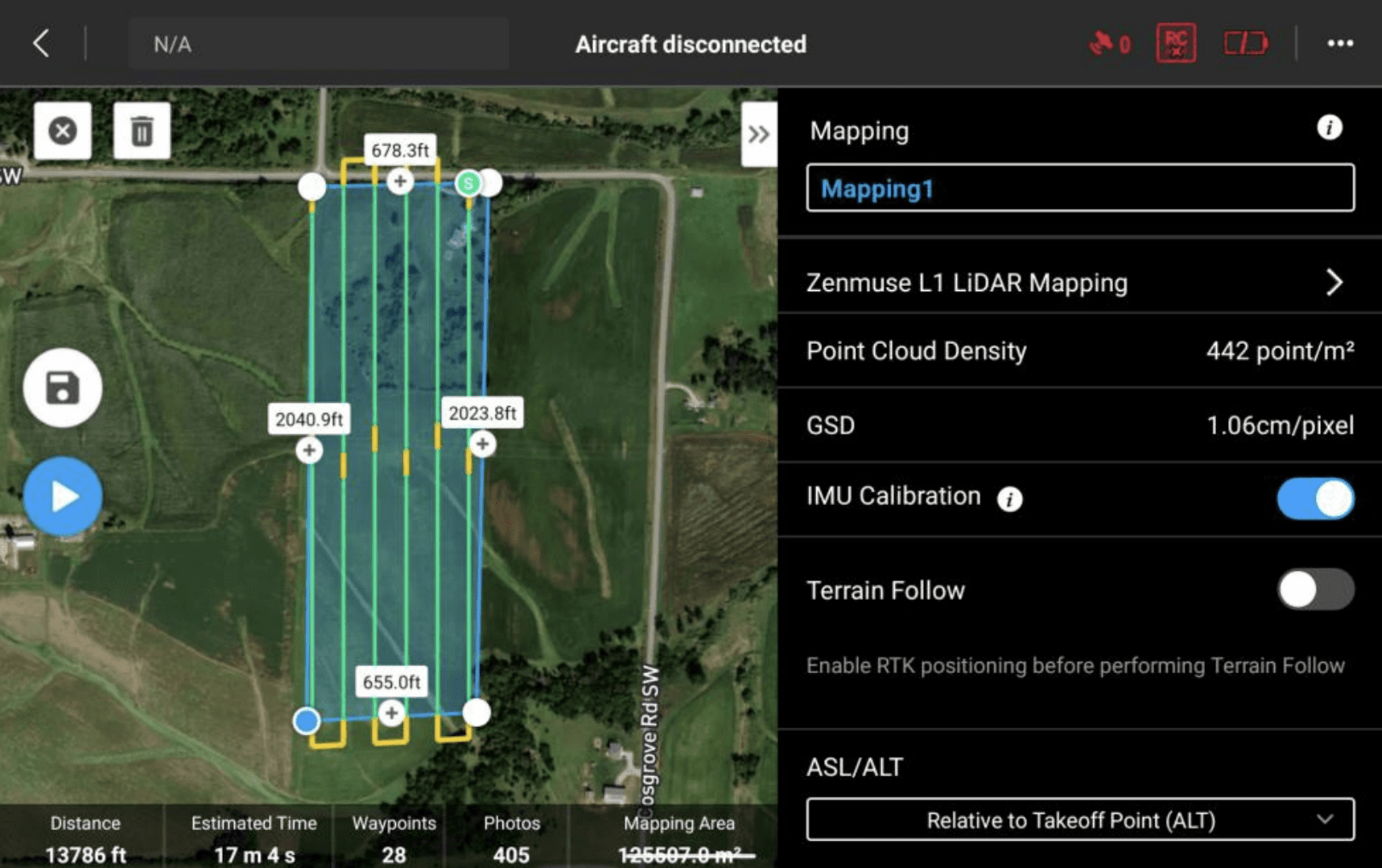
Programvara för planering av flyguppdrag används för att planera flygvägen för en drönare utrustad med ett LiDAR-system. Denna programvara gör det möjligt för användaren att definiera ett område som ska undersökas och genererar sedan automatiskt en waypoint-baserad flygrutt. Användaren kan justera UAV-systemparametrar och sensoråtgärder för den autonoma waypointflygningen. Mjukvaran genererar sedan en flygbana som effektivt täcker området och samlar in nödvändig data för LiDAR-systemet. Dessa data kan användas för att skapa detaljerade 3D-kartor eller modeller av det undersökta området.
Programvara för flygövervakning och kontroll låter användaren övervaka flygvägen och statusen för UAV- och LiDAR-systemet i realtid under datainsamling. Programvaran kan visa olika parametrar som höjd, hastighet och batterinivå. Denna information är avgörande för att säkerställa UAV:s säkerhet och för att samla in högkvalitativa LiDAR-data. Dessutom kan programvaran för flygövervakning varna användaren vid eventuella problem eller funktionsfel under flygningen.
Raw Point Cloud Processing Software är OEM-mjukvara utvecklad av sensortillverkare. Den används för att bearbeta rå LiDAR-data som samlats in från alla systemkomponenter och mata ut LiDAR-data till ett manipulerbart format som LAS/LAZ för vidare användning.
Point Cloud Processing Software avser datorprogram som är utformade för att manipulera och analysera punktmolnsdata. Beroende på applikation kan programvara för punktmolnsbearbetning användas för olika uppgifter som att skapa ritningar, utföra mätningar, extrahera ytor, klassificering med mera.
Nyckelterminologier och kunskap
Reflektivitet på olika ytor
Olika objektytor har olika reflektionshastigheter.
De flesta föremålsytor har en reflektionsförmåga på över 10 %.
Vatten är en stark absorbator, och en typisk LiDAR-laser med en våglängd på 905nm kommer att absorberas direkt. Om inte LiDAR är av den batymetriska typen och laservåglängden är kortare kommer den inte att tränga igenom vatten.
Här är några exempel på ytreflektionshastigheter:
Nylagd asfalt: 4-7 %
Torrt gräs: 15-20 %
Trädkronor: 5-20 %
Våt betong: 30-50 %
Snö: 60-90 %
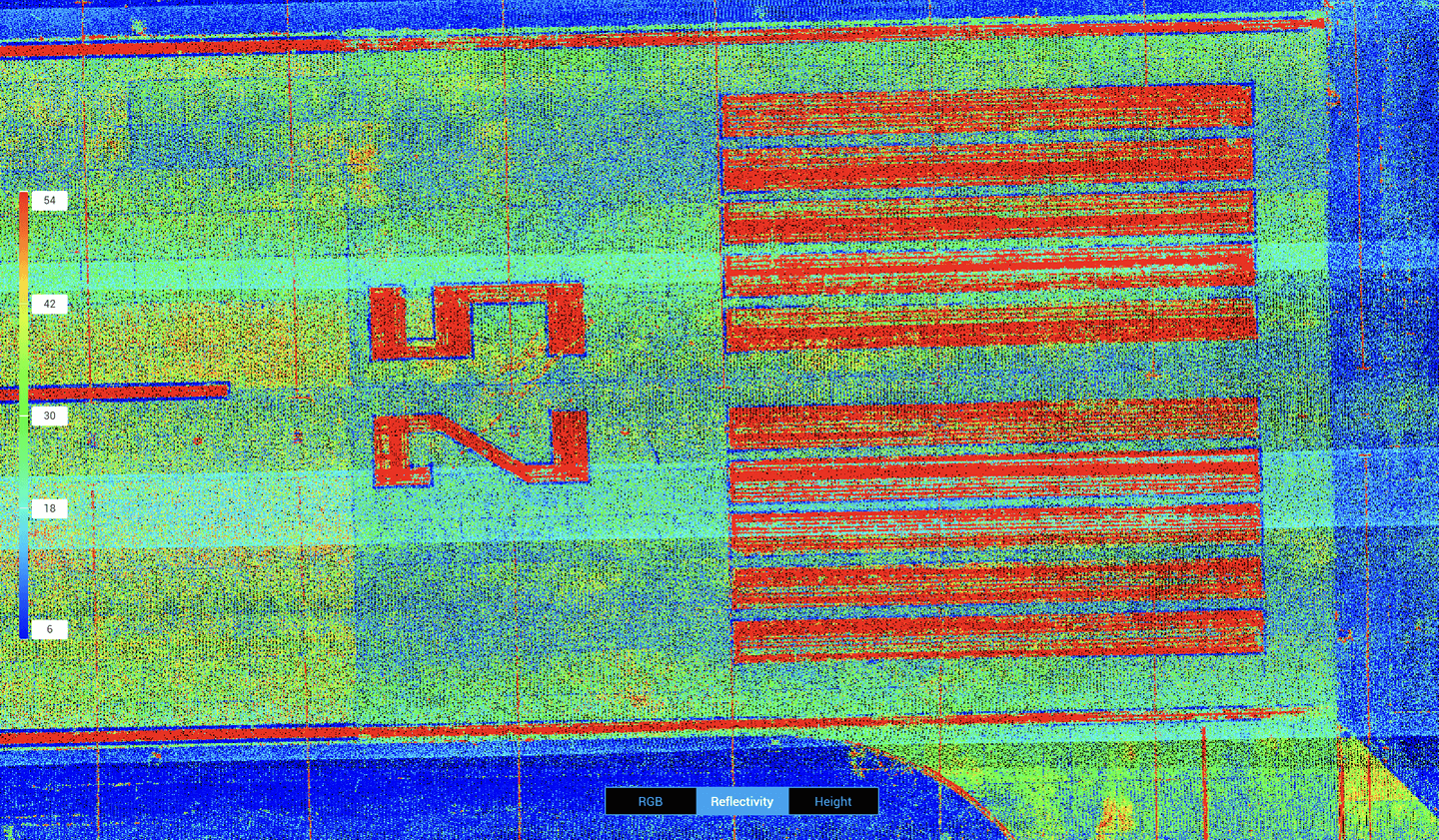
Punktmoln färgat av ytreflektivitet (röd är hög, blå är låg)
LiDAR skanningsmetoder
Genom att ändra rotationsmetoden inuti LiDAR-sensorn kan LiDAR-systemet uppnå två olika mekaniska scanningslägen: repetitiv scan och icke-repetitiv scan.
Repetitiv skanningsmetod
Upprepad skanning täcker endast horisontell FOV (70,4°×4,5°)
Fördel: I mobil kartläggning skannas objekt endast under en mycket kort tidsperiod, eftersom tröghetsnavigeringsnoggrannhetsdriften är mycket liten under en kort tidsperiod, så den skannade modellen är relativt mer exakt. Nackdel: Den vertikala FOV:en är mycket liten och det finns nästan ingen vertikal ytinformation. Om vertikal ytinformation krävs måste minst två flygvägar planeras för att kompensera för förlusten av vertikal FOV. Applikation: För scenarier med relativt mild terräng och höga noggrannhetskrav, såsom terrängmätning, allmän DEM/DSM-generering. *Det rekommenderas att använda upprepad skanning vid mätning för att säkerställa punktmolnsnoggrannhet.
Icke-repetitiv skanningsmetod
Icke-repetitiv skanning kan snabbt täcka hela FOV-området (70,4°×77,2°) Fördelar: Ger full FOV-täckning, kan utföra vertikal skanning och erhåller bra vertikal information från en enda skanning utan att ställa in en särskild gimbalvinkel. Nackdel: I mobil kartläggning skannas objekt vid olika positioner och tidpunkter, beroende på konsekvent tröghetsnavigeringsnoggrannhet. Om noggrannheten i tröghetsnavigeringen avviker över tiden, kommer modellens noggrannhet att minska. Detta resulterar i suddiga eller duplicerade föremål, tjockare punktmoln och tjockare ledningar. Denna effekt är särskilt uttalad vid icke-repetitiva skanningar, som har ett större synfält. Applikation: Lämplig för scenarier med relativt låga noggrannhetskrav, höga effektivitetskrav och fullständiga höjdinformationskrav, såsom urban 3D-modellering, komplex tredimensionell strukturmodellering, kraftledningsinspektion, nödsnabbkartering, etc. *I scenariot med inspektion av kraftledningar, om flygning med en linje väljs, rekommenderas att använda den icke-repetitiva skanningsmetoden.
Våglängd
LiDAR-system använder lasrar för att sända ut ljuspulser, där laserns våglängd bestämmer pulsens egenskaper. Laserns våglängd påverkar LiDAR-systemets förmåga att penetrera olika material och vilka typer av reflektioner den kan upptäcka. Följande är två vanliga LiDAR-typer och deras motsvarande våglängdsområde
Nära-infraröd (NIR) LiDAR använder vanligtvis lasrar med våglängder mellan 800 och 1 000 nanometer. NIR LiDAR-system är bättre på att penetrera vegetation och kan detektera flera returer från en enda puls, vilket gör dem idealiska för skogsbruk. Dessa LiDAR-system kan dock inte penetrera vatten och är inte lämpliga för batymetriska tillämpningar.
Batymetrisk LiDAR använder kortare ljusvåglängder i det gröna och blåa spektrumet för att penetrera vatten och mäta havsbottens djup. Det gröna laserljuset med en våglängd på 532 nm är det vanligaste som används för batymetrisk LiDAR eftersom det penetrerar vatten bättre än andra våglängder. Det blå laserljuset med en våglängd på 445 nm används också i vissa batymetriska LiDAR-system eftersom det ger bättre penetration i klart vatten. De batymetriska LiDAR-systemen används för applikationer som kartläggning av havsbotten, förvaltning av kustzoner och inspektion av undervattensinfrastruktur.
Detektionsområde
Detektionsräckvidd avser det maximala avstånd vid vilket ett LiDAR-system kan detektera och mäta objekt exakt. Flera faktorer påverkar detekteringsräckvidden för ett LiDAR-system, inklusive laserns effekt och våglängd, mottagarens känslighet och reflektionsförmågan hos objekten som skannas. Typiskt tillhandahålls specifikationen för detektionsområde med målytans reflektivitet eller miljöförhållanden som referens.
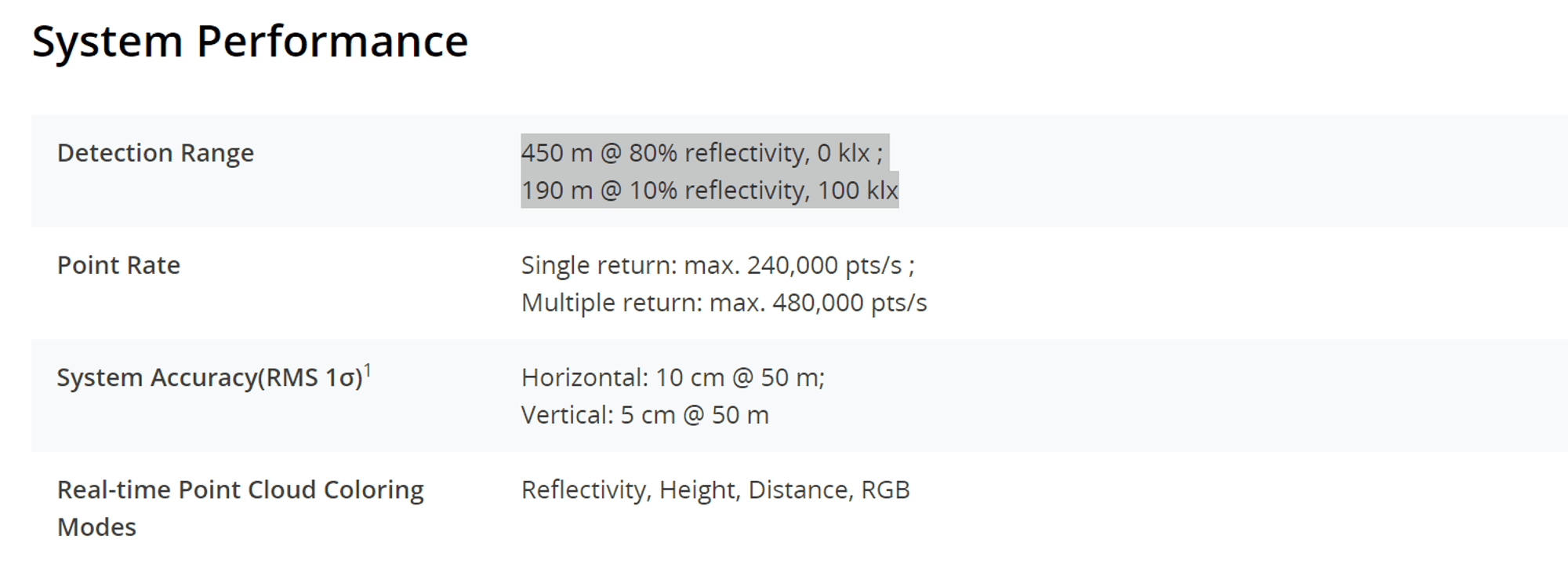
Det är värt att notera att det maximala detektionsintervallet som anges av LiDAR-tillverkare vanligtvis testas baserat på en reflektivitet på 90 %, vilket inte är meningsfullt för praktisk användning. Detekteringsavståndet vid en reflektivitet på 10 % har mer praktisk betydelse eftersom det gäller de flesta ytor. Längre detektionsområde är önskvärt för LiDAR-system eftersom det möjliggör större täckningsområde och mer omfattande datainsamling.
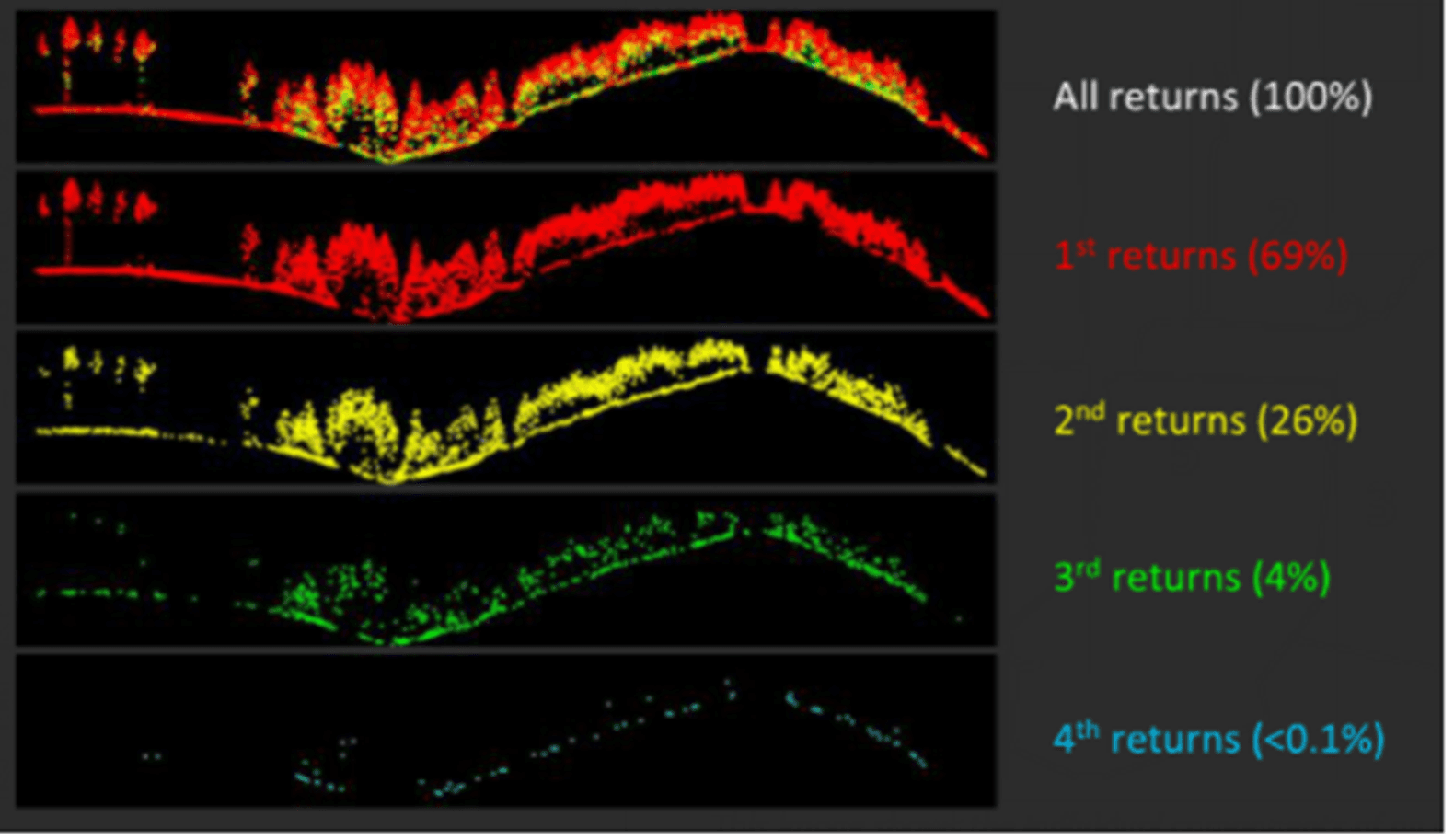
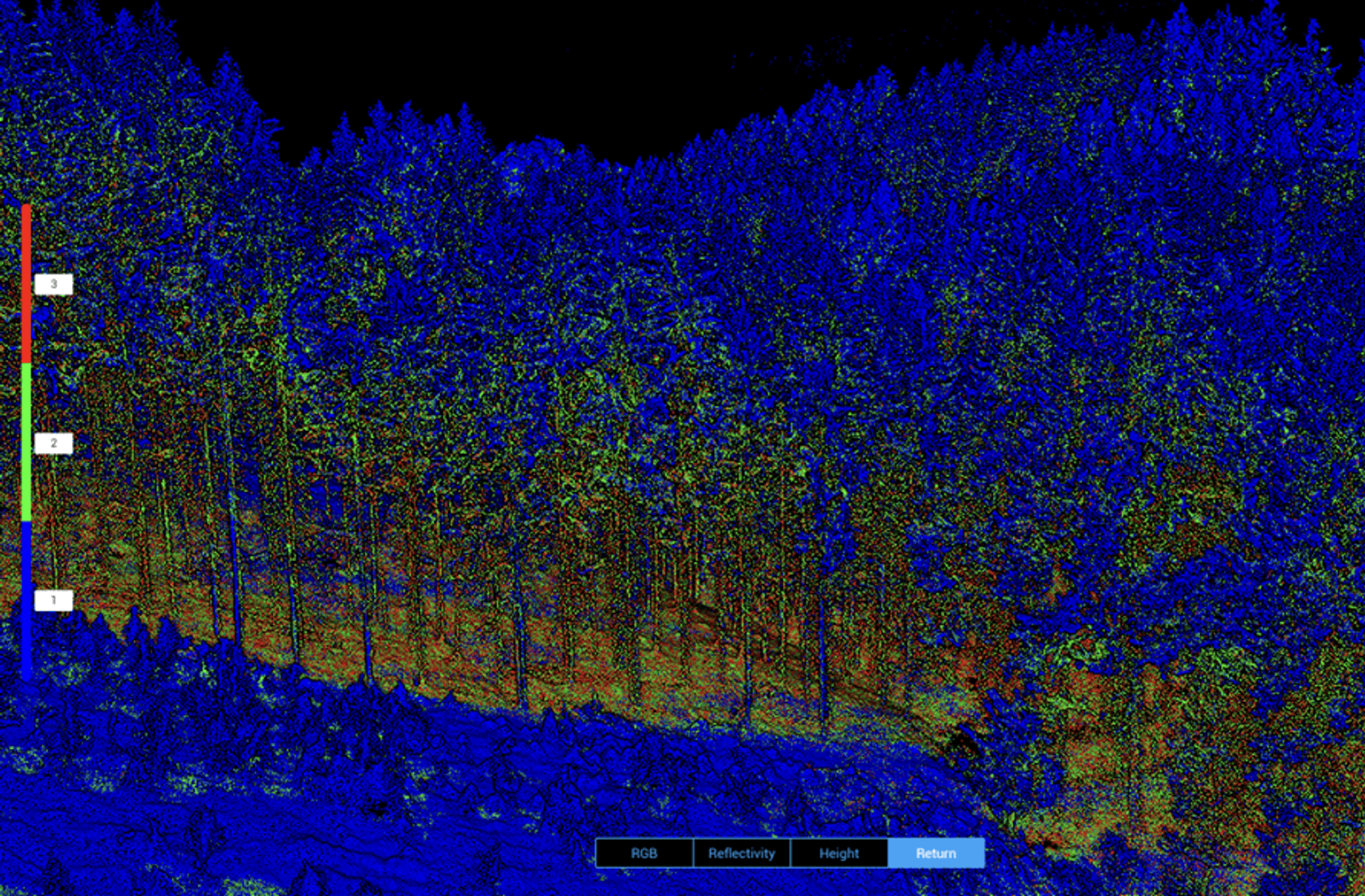
Flera returer
Lasern i ett LiDAR-system skickar ut pulser. När dessa pulser träffar hinder reflekteras de tillbaka. Eftersom ljuset inte blir helt blockerat fortsätter det att lysa och studsar tillbaka varje gång det träffar något. Detta gör att det verkar som att LiDAR kan "se igenom" vegetation. Men vad som verkligen händer är att LiDAR upptäcker marken och trädkronorna genom att titta genom luckor mellan bladen.
Första retur: Detta är den första reflektionen som sensorn fångar, ofta från det översta föremålet i laserpulsens bana (som trädtopparna eller byggnadernas toppar).
Mellanreturer: Dessa är reflektioner från objekt mellan det översta objektet och marken (som grenar eller fönster).
Sista retur: Detta är vanligtvis reflektionen från marken eller basen av ett föremål.
*Regn eller smog i luften kan orsaka störningar och brus i LiDAR-data. I dessa situationer rekommenderas att använda den starkaste "enkelavkastningen".
Relaterade applikationer
Möjligheten att upptäcka flera returer möjliggör en mer detaljerad förståelse av objektet. Till exempel:
Vegetationsextraktion: Segmentera enskilda växter, räkna dem, beräkna biomassa och analysera vegetationsparametrar.
Topografisk kartläggning: Extrahera DEM (Digital Elevation Model) från DSM (Digital Surface Model) för terränganalys.
Modellering av kraftledningar: Kraftledningar överlappar ofta varandra, och multireturförmågan kan mäta flera lager av ledningar på en gång, vilket minskar saknad data på grund av hinder.
Stråldivergens
Stråldivergens avser spridning eller breddning av en laserstråle över avstånd. Stråldivergens representerar vinkeln med vilken laserstrålen sprids när den färdas från LiDAR-sensorn och rör sig längre från dess ursprungspunkt. I huvudsak innebär en mindre stråldivergens att lasern förblir mer fokuserad över längre avstånd, medan en större stråldivergens innebär att lasern kommer att spridas ut mer när den färdas.
Inverkan på genomträngning av trädkronor
I miljöer som skogar är en mindre stråldivergens (mer fokuserad stråle) vanligtvis mer effektiv för att penetrera trädkronan och nå marken nedanför. Detta beror på att en mer koncentrerad laserstråle lättare kan hitta luckor mellan löv och grenar, vilket resulterar i bättre markpunktsdetektering. Å andra sidan kan en laser med högre stråldivergens spridas från trädkronan mer och kanske inte når marken under lika effektivt.
Inverkan på punktdensitet och upplösning
Medan en mer fokuserad stråle (mindre divergens) kan ge mer exakta och högre upplösningsresultat, kan en stråle med större divergens täcka ett större område med varje puls, vilket leder till potentiellt lägre punktdensitet och upplösning vid målet.
Inverkan på räckvidd och energidistribution
Lasrar med mindre stråldivergens bibehåller sin energikoncentration över längre avstånd. Detta är avgörande för LiDAR-system som behöver fungera över långa avstånd. När strålen divergerar mer sprids energin över ett större område, vilket potentiellt minskar retursignalens styrka, särskilt på längre avstånd.
Atmosfärisk interaktion
Stråldivergens kan också spela en roll i hur lasern interagerar med partiklar i atmosfären som damm, dimma eller regn. En laserstråle med större divergens kan spridas mer på grund av interaktioner med dessa partiklar, vilket kan minska LiDAR-systemets effektiva räckvidd och noggrannhet under vissa förhållanden.
Samplingshastighet
Samplingsfrekvens hänvisar till antalet punkter som samlats in av ett LiDAR-system under en given tidsperiod. Det mäts i hertz (Hz). En högre samplingshastighet innebär att fler punkter samlas in per sekund, vilket resulterar i ett tätare punktmoln. Men en högre samplingsfrekvens innebär också att mer data samlas in, vilket kan leda till större filstorlekar och längre efterbehandlingstider. Därför bör samplingshastigheten för ett LiDAR-system väljas noggrant baserat på projektets specifika densitetsbehov. Det är viktigt att notera att samplingsfrekvensen ensamt inte bestämmer exaktheten hos LiDAR-data. Andra faktorer, såsom laserstråledivergensen och noggrannheten hos IMU och GPS, spelar också en betydande roll för att bestämma noggrannheten av din data.
IMU-kalibrering
LiDAR-noggrannheten är nära kopplad till IMU:ns precision. När en drönare flyger i jämn takt kan IMU:n förlora sin precision. Därför kräver de flesta luftburna LiDAR-system IMU-kalibrering före, under och efter flygningen. Om IMU inte är kalibrerad kan det resultera i felaktiga data, vilket påverkar efterföljande analys och tillämpningar som förlitar sig på LiDAR-data. Det finns två vanliga metoder för att kalibrera IMU under drönarflygning: kalibreringarna "siffra-åtta" och "snabba upp och sakta ner". Både manuella och automatiska kalibreringsmetoder ger samma resultat. DJI:s integrerade LiDAR-system använder "speeding up-slowing down"-kalibreringsmetoden, och IMU-kalibreringsprocessen integreras automatiskt när du utför alla uppdragsflygningar. När du flyger DJI LiDAR-systemet manuellt, kommer DJI Pilot-appen att påminna användaren om att kalibrera om IMU efter en tids flygtid.
Prestationspåverkande faktorer
Effektivitet och penetrationshastighet kan påverkas av olika faktorer i LiDAR-teknologin. Stråldivergens och multipla returer spelar en roll vid penetration, medan IMU-kalibrering påverkar noggrannheten. Bandinriktning påverkar precisionen och olika skanningsmetoder påverkar vertikal skanningstäckning och densitet. Flyghastighet och samplingshastighet påverkar också tätheten. Faktorer som påverkar densitet:
Samplingsfrekvens: En högre pulsrepetitionsfrekvens (PRF) eller samplingsfrekvens kan resultera i en högre punktdensitet, förutsatt att andra faktorer som flyghastighet och höjd förblir konstanta.
Flyghöjd: Att flyga på lägre höjd resulterar vanligtvis i högre punkttäthet eftersom laserpulserna har ett mindre fotavtryck på marken.
Överlappning: Mätning med överlappande flyglinjer kan öka punkttätheten i de överlappande områdena.
Terräng och växtlighet: Funktioner som täta skogar kan resultera i flera returer från en enda laserpuls, vilket potentiellt ökar den effektiva tätheten i dessa områden.
Flyghastighet: En lägre flyghastighet möjliggör en högre punktdensitet eftersom LiDAR-sensorn har mer tid att skicka ut laserpulser och detektera deras returer.
Raw LiDAR-databehandling
Punktmolndensitet
Densitet beskriver antalet LiDAR-punkter som samlas in per ytenhet. Det uttrycks ofta som punkter per kvadratmeter (pts/m^2). Till exempel betyder en densitet på 10 pts/m^2 att det i genomsnitt finns 10 LiDAR returpunkter på varje kvadratmeter av det undersökta området. Olika vertikala industrier har olika krav på punktmolndensitet:
Mätning och kartläggning: För kartor i skala 1:500 är den nödvändiga punktmolndensiteten ≥16 punkter/kvadratmeter.
Inspektion av kraftledningar: För detaljerad analys av trädbarriärer eller grundliga inspektioner kräver kraftledningar i allmänhet minst 25 punkter/kvadratmeter. Vissa specifikationer kräver ännu bättre densiteter, som når upp till 50 eller till och med 250 punkter/kvadratmeter.
Skoglig inspektion: En punktmolndensitet på minst 20 punkter/kvadratmeter är nödvändig för att möta kraven för individuell trädsegmentering.
Programvara för bearbetning av råa punktmoln har vanligtvis också en funktion för att justera punktdensiteten
Verifiering av LiDAR-höjdnoggrannhet
Att verifiera noggrannheten hos LiDAR-data med hjälp av höjdkontrollpunkter är en vanlig metod för att säkerställa att de härledda digitala höjdmodellerna (DEM) eller digitala terrängmodeller (DTM) är korrekta representationer av marken.
Principer för att ställa in höjdkontrollpunkter:
Kontrollpunkterna ska vara jämnt fördelade och iögonfallande placerade.
Undvik att placera dem i områden där flygstråk överlappar varandra eller där det finns plötsliga höjdförändringar.
Kontrollpunkter bör placeras på utsatta och plana ytor.
Höjdreferensen för kontrollpunkterna ska matcha höjdreferensen för laserpunktmolnet.
Riktlinjer för höjdkontrollpunkter:
Sprid ut checkpoints jämnt på tydliga ställen.
Placera dem inte där flygvägar korsar eller där marknivån ändras snabbt.
De ska stå på öppen plan mark.
Se till att deras höjd matchar höjden som används i LiDAR-data.
LAS Point Cloud Format
LAS-formatet utvecklades av American Society for Photogrammetry and Remote Sensing (ASPRS) för att möjliggöra utbyte av LiDAR punktmolndata mellan olika företag och byråer. LAS-format är ett standardiserat filformat för att lagra och utbyta LiDAR punktmolndata, som innehåller information om varje punkts plats, intensitet, klassificering och andra attribut. Det är också det levererade resultatet från DJI LiDAR-systemen. LAS-formatet för punktmolndata inkluderar information som de tredimensionella koordinaterna för punkter, RGB-färger, reflektans, GPS-tid, antal returer och vilken returpunkt en punkt är. LAS-filversionering kan vara ett problem när man försöker läsa eller skriva en fil. Det är viktigt att se till att LAS-filversionen som används är kompatibel med tredjepartsprogramvaran som används för att bearbeta den. Vissa program från tredje part kanske inte kan läsa eller skriva vissa versioner av LAS-filer. Om ett kompatibilitetsproblem uppstår kan det vara nödvändigt att använda en annan version av LAS-filen eller att hitta annan programvara från tredje part som stöder den version som används. DJI Terra exporterar LiDAR-punktmolndata i formatet LAS version 1.2, som är en mycket kompatibel version av LAS-filen.
Punktmolnfärgning
Färgade punktmoln kan ge användarna ytterligare sammanhang, vilket gör det lättare att tolka och förstå data. Till exempel kan en byggnad och ett träd ha liknande strukturella former i vissa aspekter, men färg kan omedelbart skilja dem åt. De flesta LiDAR-antennsystem är utrustade med RGB-kameror som tar högupplösta bilder samtidigt med LiDAR-datainsamling. Dessa bilder kan sedan användas för att tilldela färgvärden till motsvarande LiDAR-punkter. Fördelar med färgsättning:
Visuell dragningskraft: Färgade punktmoln är mer visuellt tilltalande och begripliga än gråskala.
Förbättrad analys: Färg kan ge ytterligare information, som att hjälpa till med vegetationsanalys genom att skilja mellan olika typer av växter eller i urban kartläggning för att skilja mellan olika infrastrukturer.
Integration med andra datauppsättningar: Ett färgat punktmoln kan enkelt integreras med andra geospatiala datauppsättningar, vilket ger en heltäckande bild av ett undersökt område.
Ytterligare fotogrammetriprocess: RGB-foton kan också användas för fotogrammetribehandling, förutom punktmolnfärgning.
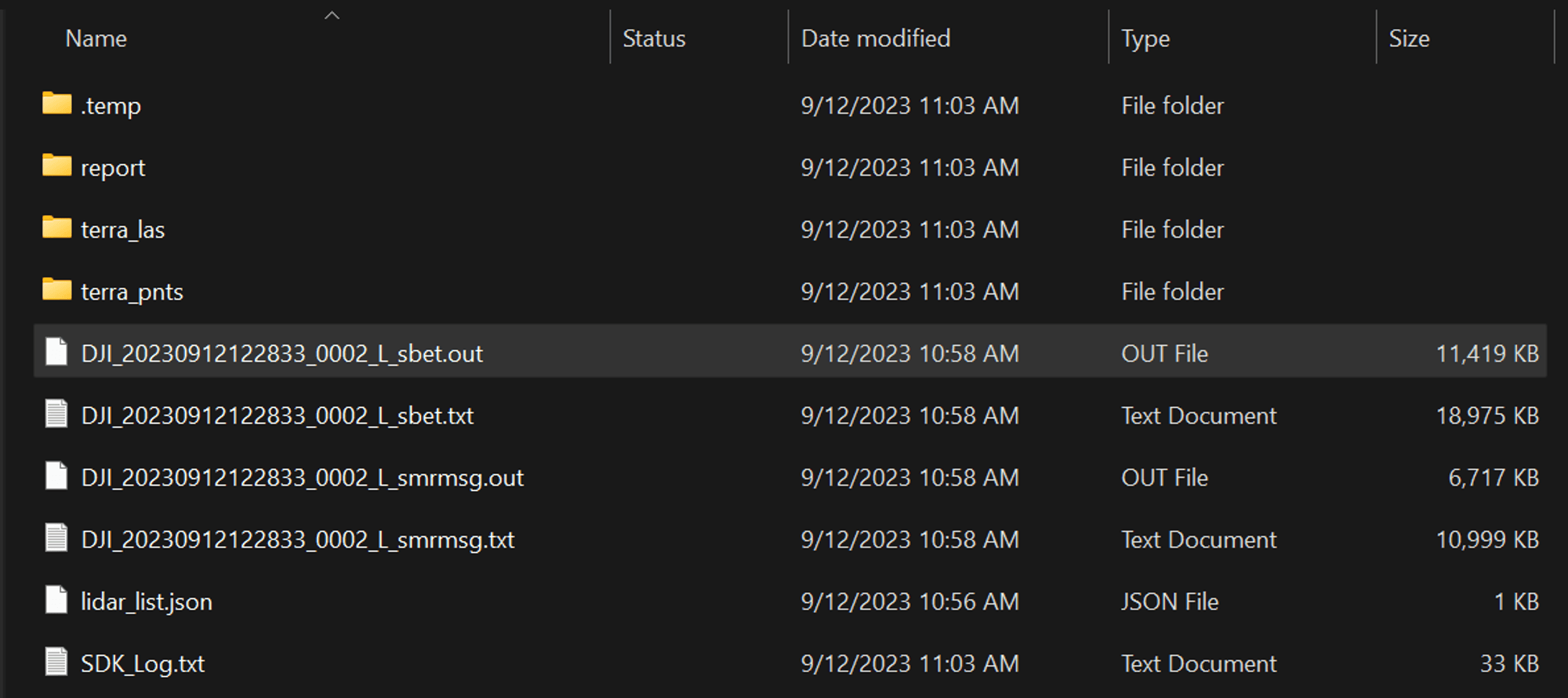
Flygbana
Flygbana hänvisar till den väg som flygs av en UAV utrustad med ett LiDAR-system under datainsamling. Flygbana är en kritisk faktor i LiDAR-databehandling eftersom den tillhandahåller platsdata för varje punkt i punktmolnet. Flyginformation är nödvändig för att exakt georefererade LiDAR-data och producera korrekta 3D-modeller av det undersökta området. SBET hänvisar till Smoothed Best Estimate of Trajectory. Det är ett vanligt använt efterbehandlat filformat som innehåller mycket exakta GPS- och IMU-data. Detta format för flygbanefilen kan korreleras med LAS-punktmolnet för ytterligare efterbearbetning. Efterbehandlingsbanan för LiDAR-uppdraget genereras vanligtvis automatiskt tillsammans med den leveransbara punktmolnets LAS-fil. Det kan importeras till programvara från tredje part för visning av flygbanan.
Flygstråkskorrigering
Flygstråksjustering är en procedur för att rätta till systematiska fel och feljusteringar i luftburna LiDAR-data, speciellt när de samlas in över flera flygstråk. När en terräng undersöks med hjälp av luftburen LiDAR är området vanligtvis täckt av flera överlappande remsor eller flygbanor. Överlappningen är avsiktlig för att säkerställa kontinuitet i täckningen och för att underlätta felkorrigering. Under LiDAR-datainsamling kan flera faktorer introducera fel i data:
Sensordrift: Med tiden kan IMU:n och GPS:en uppleva små avvikelser i sina avläsningar.
Flygdynamik: Turbulens, snabba höjdförändringar och förändringar i drönarens orientering kan påverka den insamlade informationen.
På grund av dessa faktorer kan intilliggande flygstråk ibland uppvisa vertikala eller horisontella felmatchningar. Om de inte korrigeras kan dessa fel påverka efterföljande analys och applikationer som förlitar sig på LiDAR-data. Fördelar med flygstråkskorrigering:
Förbättrad datakonsistens: Minskar oöverensstämmelse och säkerställer kontinuitet över intilliggande flygstråk.
Högre kvalitetsderivat: Kvaliteten på härledda produkter som Digital Elevation Models (DEM) och Digital Surface Models (DSM) förbättras.
Tillförlitlighet: Ökar förtroendet för noggrannheten i LiDAR-datauppsättningen, vilket gör den mer tillförlitlig för olika applikationer, från topografisk kartläggning till skogsbruk.
Raw LiDAR Data Processing med DJI Terra programvara
DJI Terra-mjukvaran är den enda programvaran som stöds och som används för att bearbeta och exportera rå LiDAR-punktmolndata som samlats in från ett DJI LiDAR-system i det universella LAS-formatet.
Viktiga LiDAR-bearbetningsfunktioner
DJI Terra är en gratis att börja LiDAR-rådatabehandlingsprogramvara som möjliggör skapandet av LAS-punktmolnleveranser från LiDAR-rådata. Den är också fullspäckad med ytterligare funktioner.
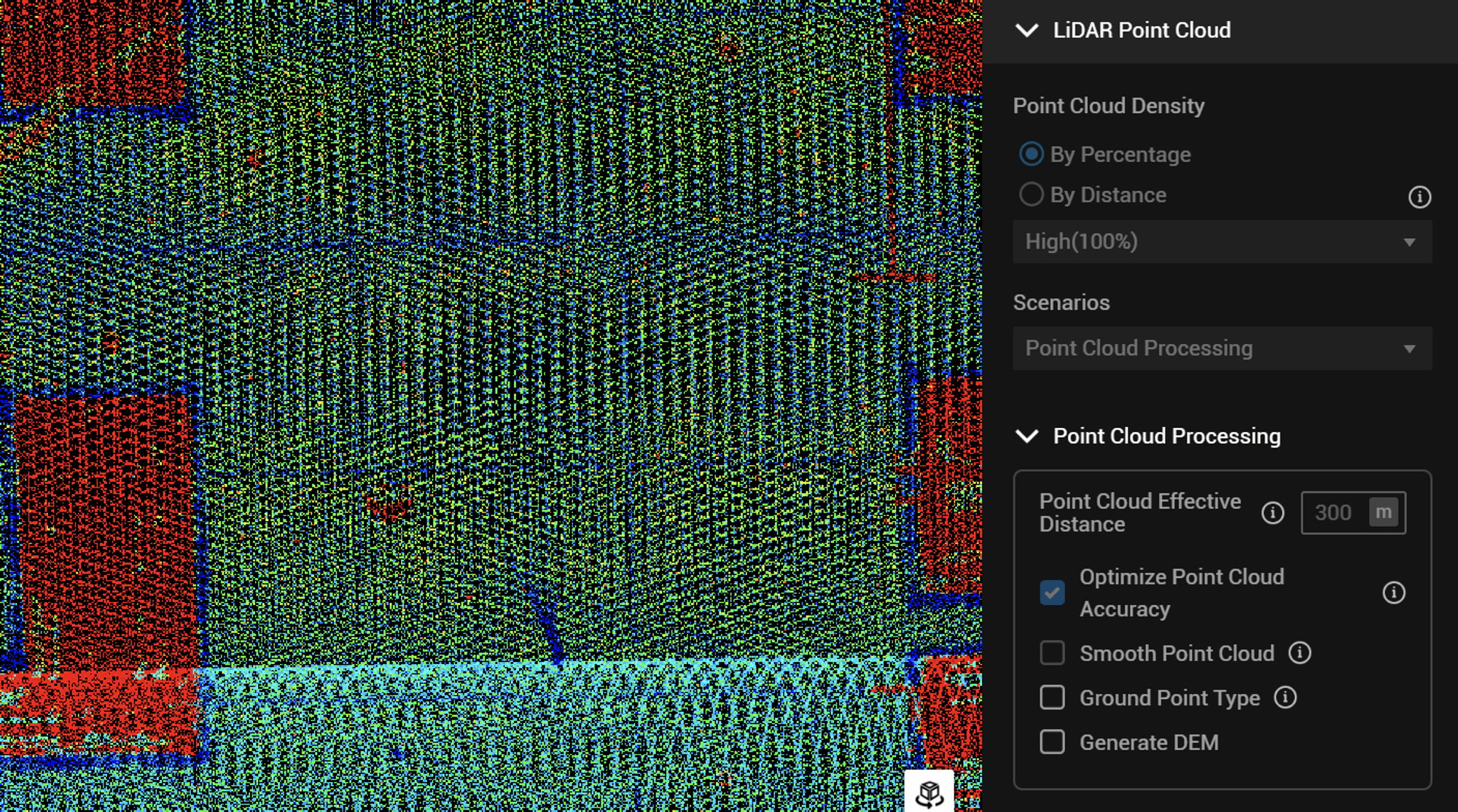
Justera Punktmolndensitet
Avser antalet punkter som samlats in per ytenhet. Denna funktion gör det möjligt att justera punktdensiteten för att möta specifika industrikrav.
Optimera punktmolnets noggrannhet
Den här funktionen använder LPP-algoritmen (Rem Locality Preserving Projections) för att minimera det vanliga skiktningsfenomenet med punktmoln, vilket gör att punktmolnen justeras på ett tunnare lager för att förbättra punktmolnsmodellens noggrannhet.
Smooth Pointcloud
Den här funktionen förfinar punktmolnet genom att filtrera bort brus och minska effekten av fel för att skapa en jämnare visuell representation.
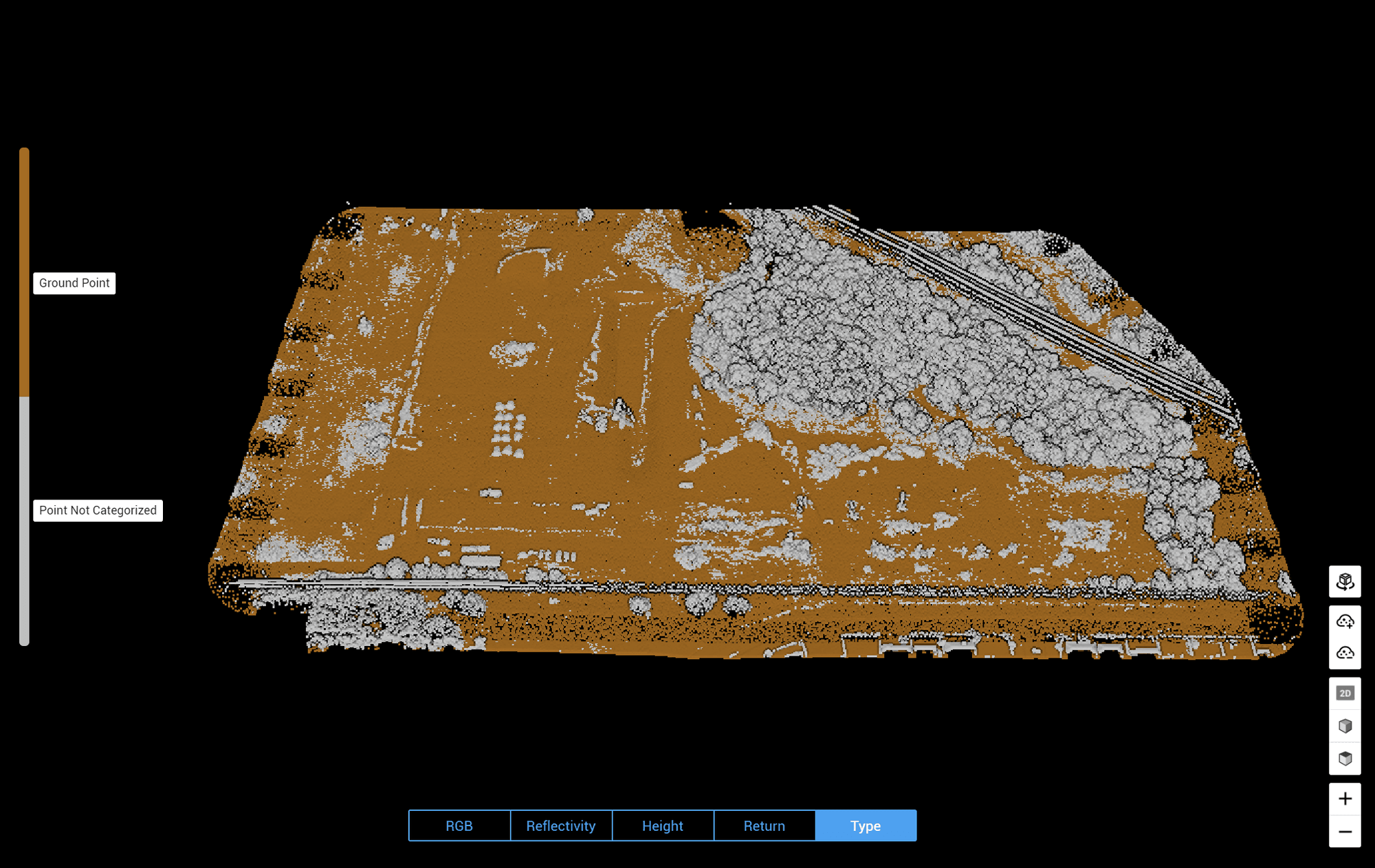
Markpunktsklassificering
Används för att skilja markpunkter från andra objekt i punktmolnet för att generera en Digital Elevation Model (DEM).
Generera DEM
Den här funktionen genererar en GeoTiFF-formaterad Digital Elevation Model (DEM) från det klassificerade markpunktmolnet.
Vertikal noggrannhetskontroll och skift
Verifierar noggrannheten hos LiDAR-data med hjälp av höjdkontrollpunkter för att säkerställa att de härledda DEM:erna eller DTM:erna är korrekta representationer av marken.
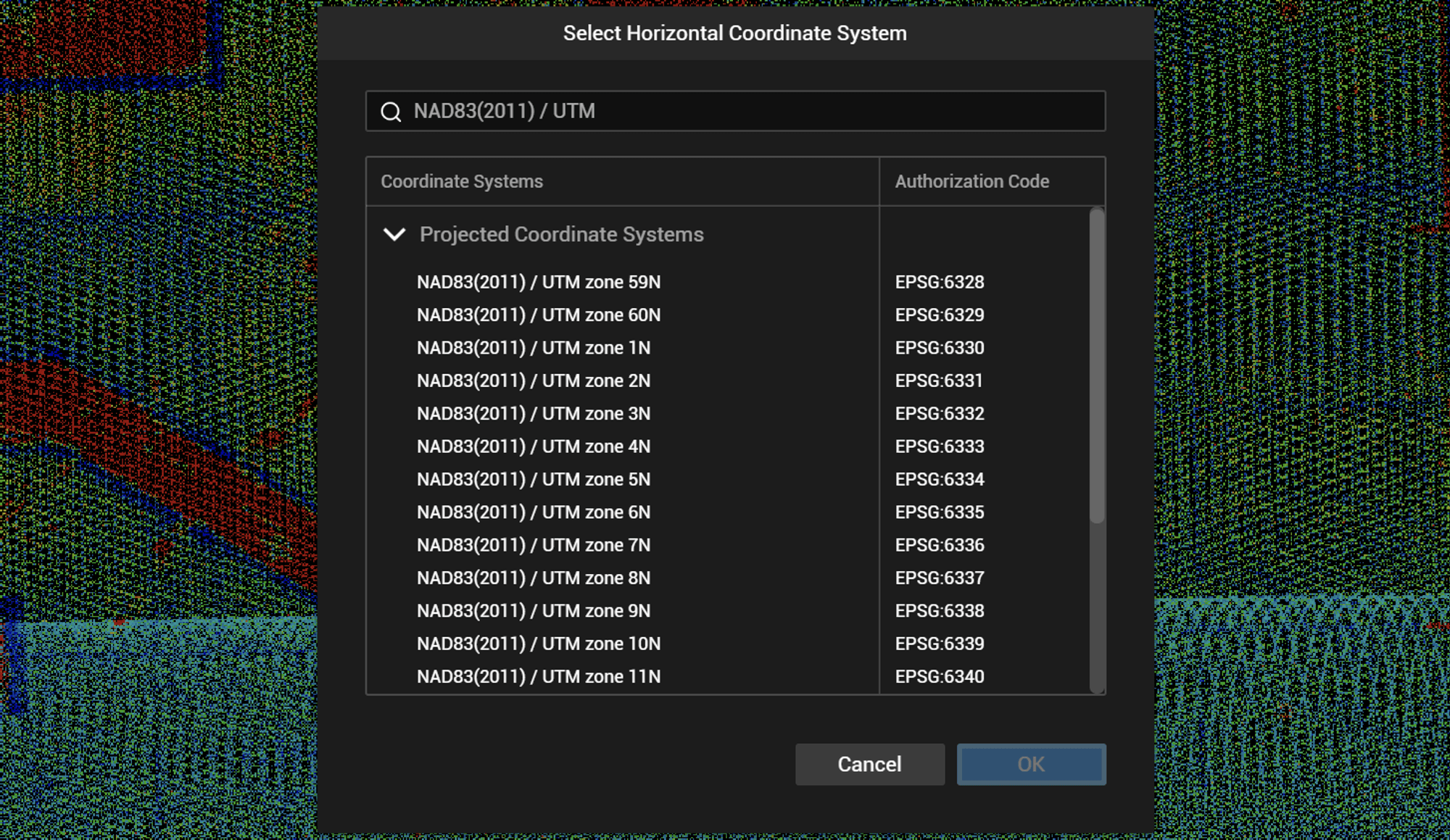
Koordinatsystemtransformation
Möjliggör enkel transformation av lokala projicerade eller geodetiska koordinatsystem för olika kart- och undersökningsprojekt över hela världen.
DJI LiDAR PPK Process Allmänt arbetsflöde
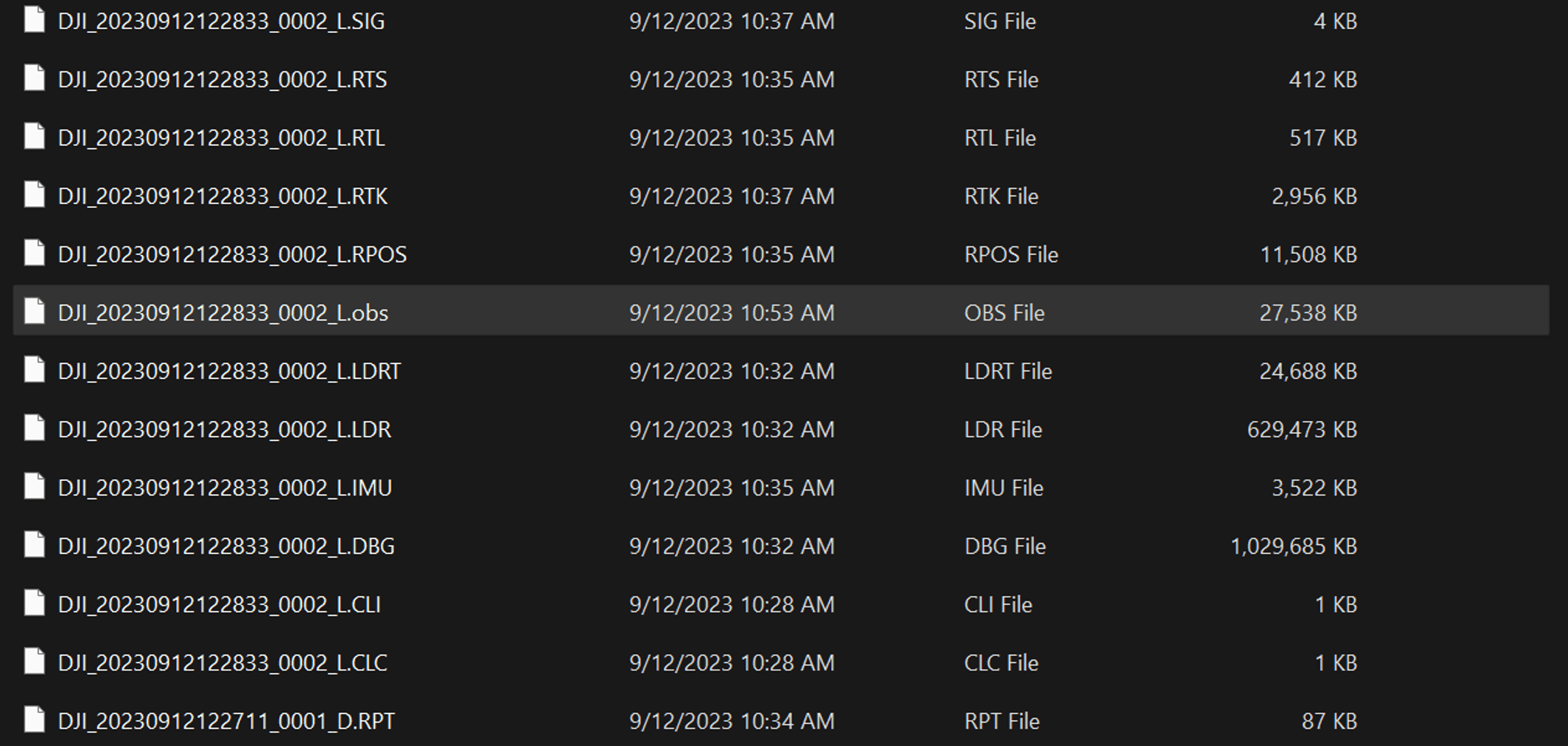
PPK står för Post-Processed Kinematic. Det är en metod som används vid LiDAR-databehandling som innebär att man samlar in rå GNSS-data (Global Navigation Satellite System) under LiDAR-flygningen och sedan exakt beräknar LiDAR-punkternas positioner med hjälp av efterbearbetningsprogram. Genom att använda PPK-metoden kan användare samla in data först och referera dem senare, vilket eliminerar behovet av att ställa in referensen i förväg. Efter LiDAR-flygningen efterbehandlas den insamlade råa GNSS-data från både basstationen och LiDAR-sensorn med hjälp av specialiserad programvara. Denna efterbearbetning innebär att jämföra rå GNSS-data från basstationen, som ger korrekt positionsinformation, med rå GNSS-data från LiDAR-sensorn. Genom att analysera skillnaderna mellan de två datamängderna kan programvaran beräkna mycket exakta positioner för varje LiDAR-punkt. PPK-metoden är särskilt användbar i situationer där kinematisk positionering i realtid (RTK) inte är möjlig eller där högprecisionspositionering krävs. Det möjliggör generering av mycket exakta och georefererade LiDAR-punktmoln, som är väsentliga för olika applikationer som mätning, kartläggning och infrastrukturinspektion. 1. För att bearbeta DJI LiDAR-data med PPK-metoden, se till att först förbereda basstationens referensfil. DJI LiDAR stöder följande basstationsfilformat och motsvarande version: För en introduktion till hur RTK fungerar, se vår guide om RTK.
Filformat som stöds | Version | Meddelandetyp | Filnamn och filsuffix måste byta namn till: |
|---|---|---|---|
RINEX | V2.1.x V3.0.x | / | DJI_YYYYMMDDHHMM_XXX.obs |
RTCM | V3.0 V3.2 | V3.0: 1003, 1004, 1012, 1014 V3.2: MSM4, MSM5, MSM6, MSM7 | DJI_YYYYMMDDHHMM_XXX.rtcm |
OEM | OEM4 OEM6 | RANGE | DJI_YYYYMMDDHHMM_XXX.oem |
UBX | / | RAWX | DJI_YYYYMMDDHHMM_XXX.ubx |
Det rekommenderas att baslinjen, eller avståndet mellan basstationen som används för att registrera PPK och drönaren är inom 10 km. Basstationsfilen som används för PPK-processen måste innehålla hela LiDAR-skanningsuppdragets varaktighet. 2. Följ tabellen ovan för att byta namn på basstationens referensfil. Det är viktigt att byta namn på både filnamnet och filändelsens suffix för basstationens referensdata korrekt. Namnet på basstationens referensfil bör vara identiskt och matcha med andra LiDAR-råfiler. För RINEX-filen, kom ihåg att ändra filtillägget från .YYO till .obs.
Se till att den omdöpta basstationens referensfil finns i samma katalog som den råa LiDAR-datamappen. Importera sedan den råa LiDAR-datamappen till DJI Terra och påbörja processen. DJI Terra läser automatiskt basstationens referensfil och initierar PPK-processen med PPK-basstationsreferensen.
Luftburna LiDAR-applikationer
Skogsförvaltning
LiDAR har ett brett utbud av tillämpningar inom skogsbruk. Den kan uppskatta trädhöjder, mäta biomassa och kartlägga skogsstruktur. Genom att använda LiDAR kan skogsförvaltare få detaljerad information om trädkronorna, vilket är svårt att få fram med traditionella undersökningsmetoder. En av de viktigaste fördelarna med LiDAR är dess förmåga att upptäcka flera returer från en enda laserpuls, vilket gör att den kan "se igenom" vegetation och exakt kartlägga markytan. Denna förmåga gör LiDAR särskilt användbar för att uppskatta markhöjden och identifiera förändringar i skogstäcket över tid, vilket kan vara till hjälp för att spåra avskogning och återplantering av skog. Dessutom kan LiDAR hjälpa till med utvecklingen av skogsinventeringar, som är avgörande för hållbar skogsförvaltning.
Volymmätning
LiDAR-tekniken kan ge exakta mätningar för volymberäkningar, vilket är användbart för industrier som gruvdrift, konstruktion och skogsbruk. Genom att använda LiDAR punktmolndata är det möjligt att exakt beräkna volymen av ett lager eller mängden material som tas bort från en plats. Denna information kan användas för lagerhantering, kostnadskontroll och resursplanering.
Topografisk undersökning
LiDAR är naturligtvis ett effektivt verktyg för topografiska undersökningar eftersom det kan kartlägga formen och egenskaperna hos jordens yta korrekt. Till skillnad från fotogrammetri kan LiDAR penetrera genom trädkronor och fånga noggranna markytor, även i områden med tät vegetation. Detta beror på att LiDAR använder laserpulser för att detektera marken och trädkronorna genom att titta genom luckor mellan löv, vilket resulterar i bättre markpunktsdetektering.
Arkeologisk forskning
Luftburen LiDAR kan användas i arkeologisk forskning för att kartlägga massiva, svåråtkomliga områden och avslöja dolda strukturer på ytan. LiDAR-sensorn kan penetrera vegetation och fånga upp högupplösta data, vilket gör det möjligt att identifiera strukturer som skulle vara svåra eller omöjliga att se från marken. Detta kan hjälpa arkeologer att bättre förstå utformningen av antika städer och bosättningar och få insikt i tidigare mänsklig aktivitet.
Inspektion av elledningar
LiDAR-teknik kan användas för att inspektera kraftledningar, vilket kan vara utmanande på grund av ledningarnas höjd och placering. Genom att använda LiDAR punktmolndata är det möjligt att skapa en detaljerad karta över kraftledningar och deras omgivning. Detta kan hjälpa till att identifiera potentiella problem som växtlighet eller hängande linjer, vilket kan orsaka strömavbrott eller säkerhetsrisker.
Infrastrukturinspektion
Med LiDARs förmåga att upptäcka små brister och sprickor använder många tekniken för att skanna vägar och byggnads-/brofasader. Detta kan hjälpa projektledare att uppmärksamma problem med strukturer som måste lösas omedelbart. Med fasader är det extra viktigt att implementera ett LiDAR-system som är gimbalupphängt för att fånga data parallellt med fasaden.