


































Kort sagt: Zenmuse L3 tar ett stort steg från L2 i räckvidd, noggrannhet, returer och kamera—och är byggd för högre AGL, större block och mer komplex terräng. L2 är fortsatt stark där flyghöjden är lägre och plattformen inte är M400. L3:s praktiska mätintervall är 300-500 m (typiskt), med upp till 950 m detektion vid 10 % reflektivitet, samtidigt som typisk systemnoggrannhet anges till 2-4 cm. L2 ligger typiskt på 120-180 m respektive 4-5 cm. Nedan hittar du en teknisk genomgång av skillnader mellan Zenmuse L3 och L2.
Se vår YouTube-video om Zenmuse L3
Innehåll
TL;DR - när ska du välja L3 respektive L2?
Spec i siffror: L3 vs L2
LiDAR-prestanda: räckvidd, puls, returer, spotstorlek
Noggrannhet och inertialnavigering (IMU)
Kamera: dual M4/3 och 100 MP-läge
Arbetsflöde: Pilot 2, Terra, Modify och flygtrygghet
Verkliga fältfall
Plattform, mekanik och miljö
I korthet: när ska du välja L3 respektive L2?
Välj Zenmuse L3 om…
du vill maximera punktkvalitet och markträffar vid ≤ 120 m, med upp till 16 returer och mindre spot (φ 41 mm @ 120 m) för tunnare objekt och bättre penetrationsförmåga i vegetation.
du behöver flexibel PRF 100-2000 kHz för att växla mellan hög detalj (lägre AGL/hög PRF) och penetrationsläge (lägre PRF/fler returer) - med tydliga höjdgränser så att rätt frekvens används lagligt (t.ex. 1 MHz kräver < 100 m, 2 MHz kräver < 50 m).
du prioriterar stabil georeferens via IMU 0,02°/0,01° (heading/pitch‑roll, post‑proc) samt automatiska kalibreringar.
du vill kombinera LiDAR och foto i ett flöde med dual M4/3 (25 MP + 25 MP) och 100 MP‑läge samt 1,2 cm GSD vid 120 m.

- LiDAR-räckvidd upp till 950 m
- Vertikal noggrannhet 3 cm
- Upp till 16 returer i skog
- 100 MP foto, 107° FOV

- Komplett drönarpaket
- 59 min flygtid per batteri
- LiDAR-räckvidd upp till 950 m
- Batteristation ingår
- 1 års DJI Care Enterprise Plus ingår (täckningsgräns 8 800 EUR)
Stanna på Zenmuse L2 om…
dina uppdrag är förhållandevis enkla i öppet landskap och typisk noggrannhet 4-5 cm räcker - samt om du är låst till M300/350‑plattformar.
Spec i siffror: L3 vs L2
Egenskap | Zenmuse L3 | Zenmuse L2 | Vad betyder det i fält |
Praktiskt mätintervall | 300-500 m (typiskt) | 120-180 m (typiskt) | L3 täcker större block per pass och kan flygas säkrare över hinder/topografi. |
Max detektion (10 % ref.) | Upp till 950 m | - | Lång räckvidd = högre AGL, färre starter/landningar. |
Typisk systemnoggrannhet | 2-4 cm | 4-5 cm | Skarpare höjdmodeller och mer förutsägbara toleranser. |
Spotstorlek @120 m | φ 41 mm, 20 % av L2:s | ≈5× större (L3 är 20 %) | Fångar tunnare objekt (ledare, isolatorer) och penetrerar vegetationen bättre. |
Max returer | Upp till 16 | 5 returer | Fler markträffar under skog → bättre DTM. |
Punktfrekvens (PRF) | 100-2000 kHz , 2 MHz kräver < 50 m AGL | 240 kHz | Flex mellan penetration (lägre PRF, fler returer) och detalj (hög PRF). |
IMU (post‑proc, 1σ) | Heading 0,02°; Pitch/Roll 0,01° | Realtid: 0.2°, bättre under efterbehandling | Lägre vinkelfel → renare punktmoln utan lång uppvärmning. |
Laseravståndsmätare (RNG) | 900 m | - | Snabb säkerhetsmarginal: vet alltid avståndet till objekt. |
Kamera | Dual M4/3 25 MP → 100 MP‑läge, GSD 1,2 cm @120 m, 3 cm @300 m, FOV 107° | Singel 4/3 CMOS kamera, Effektiva pixlar: 20 MP, FOV: 84° | Samtidig orto och färgläggning med bred FOV. |
Plattform | Endast M400, vikt ca 1,6 kg | M300, M350 & M400, vikt ca. 905 g | Kräver DJI:s nya plattform med rätt gimbalström. |
Obs! L3:s specifikation innehåller längre detektionsräckvidd, men den här guiden och alla rekommendationer är utformade för flygning vid/under 120 m AGL.
LiDAR‑prestanda: räckvidd, puls, returer, spotstorlek
Zenmuse L3 bygger vidare på tekniken från L2 men introducerar ett bredare skanningsområde, fler returer och en mindre laser-spot (φ 41 mm jämfört med L2:s cirka 70 mm). Resultatet är tätare punktmoln, bättre detalj i komplexa miljöer och tydligare markträffar under vegetation.
Skanningslägen och när de används
Skanningsläge | Horisontell/Vertikal vinkel | Användningsområde | Skillnad mot L2 |
Linjärt | H 80° / V 3° | För kraftledningar, vägar och järnvägar. Ger en exakt linjeprofil och hög noggrannhet. | Samma typ som L2:s repetitive scanning pattern. |
Stjärnformat | H 80° / V 80° | För bred täckning i stadsmiljö och vid ojämn terräng. Fyller luckor mellan objekt. | Nytt läge på L3 - ger jämnare täckning än L2. |
Icke‑repetitivt (non‑rep.) | H 80° / V 80° | För skog och tät vegetation. Ger fler markträffar och bättre penetration genom lövverk. | L2 hade ett liknande non‑repetitive pattern, men L3 har större synfält och fler returer. |
Linjär scanning:
Stjärnformat:
Icke-repetitivt (non-rep.)
Rekommenderade inställningar vid ≤ 120 m AGL
1. Vegetation och terräng (DTM‑fokus)
Höjd: 80-120 m
Punktfrekvens: 350 kHz
Returer: 8-16
Skanningsläge: Icke‑repetitivt eller stjärnformat: Ger fler markträffar och tydligare terrängmodell under vegetation. Jämfört med L2: Upp till 3× fler markpunkter och mindre brus tack vare fler returer och bättre optik.
2. Korridor‑ och ledningsmätning
Höjd: 30-120 m
Punktfrekvens: 350 kHz
Returer: 4-8
Skanningsläge: Linjärt eller stjärnformat: Stabil tvärprofil med jämn punkttäthet. Kombinera med Power Line Follow i Pilot 2. Jämfört med L2: Bättre återgivning av tunna ledningar och färre glapp mellan flyglinjer.
3. Urban detalj och fasader
Höjd: ≤ 100 m (1 MHz) / ≤ 50 m (2 MHz)
Skanningsläge: Stjärnformat: Ger extremt tät datainsamling för byggnader, väggar och snäva gaturum. Jämfört med L2: Upp till dubbelt så hög punktdensitet på samma höjd och bättre täckning nära fasader.
Sammanfattning: Både L2 och L3 erbjuder linjära och icke‑repetitiva skanningsmönster, men L3 har dessutom ett nytt stjärnformat läge och upp till 16 returer, vilket ger mer flexibel och komplett datainsamling. Tillsammans med högre punktfrekvens och mindre laser‑spot ger L3 en tydlig fördel i både skog, urban miljö och infrastrukturprojekt under 120 m AGL.
Noggrannhet & IMU under 120 m
Dokumenterat @ 120 m: H ≈ 4 cm / V ≈ 3 cm och ~1,2 cm punktmolnstjocklek på hård yta. Real‑time Z ~15 cm.
IMU‑prestanda: 0,02° heading, 0,01° pitch/roll (post‑proc, 1σ) med 200 Hz POS; non‑preheating och auto‑kalibrering i rutt/sväng. Praktiskt betyder det snabb start, mindre drift och renare punktmoln.
Vad betyder siffrorna?
H ≈ 4 cm / V ≈ 3 cm vid 120 m innebär att höjd- och lägesfelet normalt ryms inom några centimeter när du flyger lagligt (≤ 120 m).
Punktmolnets "tjocklek" ~1,2 cm på hårda ytor betyder att punkterna inte sprider ut sig mer än ungefär en centimeter runt den verkliga ytan. Det ger skarpa kanter på asfalt, betong och stål.
Real‑time Z ~15 cm betyder att om du bara använder live‑datan i fält kan höjden svaja mer. När du efterbearbetar (PPK/IMU‑lösning) krymper felet igen till centimeterklass.
Tumregel: Använd live‑visningen för orientering och kontroll - men basera leveranser på efterbearbetad data.

Hur märks det i ditt arbete?
Snabb start: Systemet kräver ingen förvärmning. Du kan lyfta och samla in data utan att vänta på att sensorn "stabiliserar" sig. Jämfört med Zenmuse L2 som krävde förvärmning innan flygning.
Färre stopp för kalibrering: Auto‑kalibrering under flygning (rakt fram för heading, svängar för pitch/roll) gör att banorna blir jämna och ger färre skarvar mellan stråk.
Renare punktmoln: Mindre vinkelfel = mindre vågighet och mindre "skuggsteg" mellan flyglinjer. Resultatet blir snyggare DTM/DSM, bättre ledningsprofiler och färre manuella fixar i efterarbetet.
Kamera - jämförelse mellan Zenmuse L3 och L2
Zenmuse L3 har ett helt nytt kamerasystem jämfört med L2. Där L2 använde en enda 20 MP-sensor, bygger L3 på två Micro Four Thirds-sensorer (M4/3 25 MP + 25 MP) som tillsammans skapar bilder på upp till 100 MP via så kallad Super Pixel Convergence. Resultatet är högre detaljskärpa, bättre ljusinsläpp och jämnare färgåtergivning särskilt vid flygning på 120 m.
Jämförelsetabell: Zenmuse L3 vs L2
Egenskap | Zenmuse L3 | Zenmuse L2 |
Sensorer | 2 × M4/3, 25 MP vardera | 4/3 CMOS, 20 MP effektiva pixlar |
Upplösning | upp till 100 MP (kombinerat läge) | 5280 × 3956 (≈ 20 MP) |
GSD @ 120 m | ca 1,2 cm | ca 3 cm |
FOV | 107° (≈ 27° bredare än L2) | 84° |
Objektiv | Fast optik optimerad för LiDAR‑synk och färg | 24 mm ekvivalent, f/2,8 - f/11 med autofokus (1 m - ∞) |
Slutare | Elektronisk synkron med LiDAR | Mekanisk 2- 1/2000 s, Elektronisk 2 - 1/8000 s |
Fördel | Större bildvinkel, mer detalj och direkt färgsättning av punktmoln även vid 20 % sidolappning | Beprövad och stabil kamera för standardortofoto på låg AGL (≤ 120 m) |

Skillnaden i praktiken?
Detaljnivå: L3:s 100 MP‑läge ger ca 5× högre pixelantal än L2. Vid 120 m betyder det att mindre objekt (t.ex. kablar, sprickor eller markdetaljer) syns tydligt utan extra pass.
Bildvinkel: Med 107° FOV täcker L3 bredare områden per bild - vilket minskar antalet flyglinjer i stora projekt.
Färgsättning av LiDAR: L3:s kameror sitter synkroniserade med LiDAR‑sensorn, så varje laserpunkt får direkt färg från samma exponering. L2 krävde ofta extra bildpass för jämn färgning.
Arbetsflöde: Med L3 kan du samla in LiDAR och foto samtidigt, bearbeta i Terra och Modify, och få både ortofoton och färgade punktmoln i ett steg.
Kort sagt: L2:s kamera räcker för traditionella ortofoton, men L3:s dual‑kamera ger en helt ny nivå av detalj och integration - särskilt när du vill kombinera högupplösta färgbilder med centimeterprecis LiDAR‑data i samma flygning.
Arbetsflöde & flygtrygghet (Pilot 2, Terra, Modify, RNG)
DJI Pilot 2
Pilot 2 är gränssnittet som används under flygning för planering, kontroll och datainsamling. Programmet ger automatiska rekommendationer baserat på vald flyghöjd (AGL) och visar beräknad punktdensitet redan innan start. Under flygning kan operatören växla mellan punktmolnsvy, RGB-vy och FPV-kamera, vilket gör det lättare att följa upp datakvalitet i realtid. I fält går det även att göra snabba mätningar av punkt, linje, area och volym.
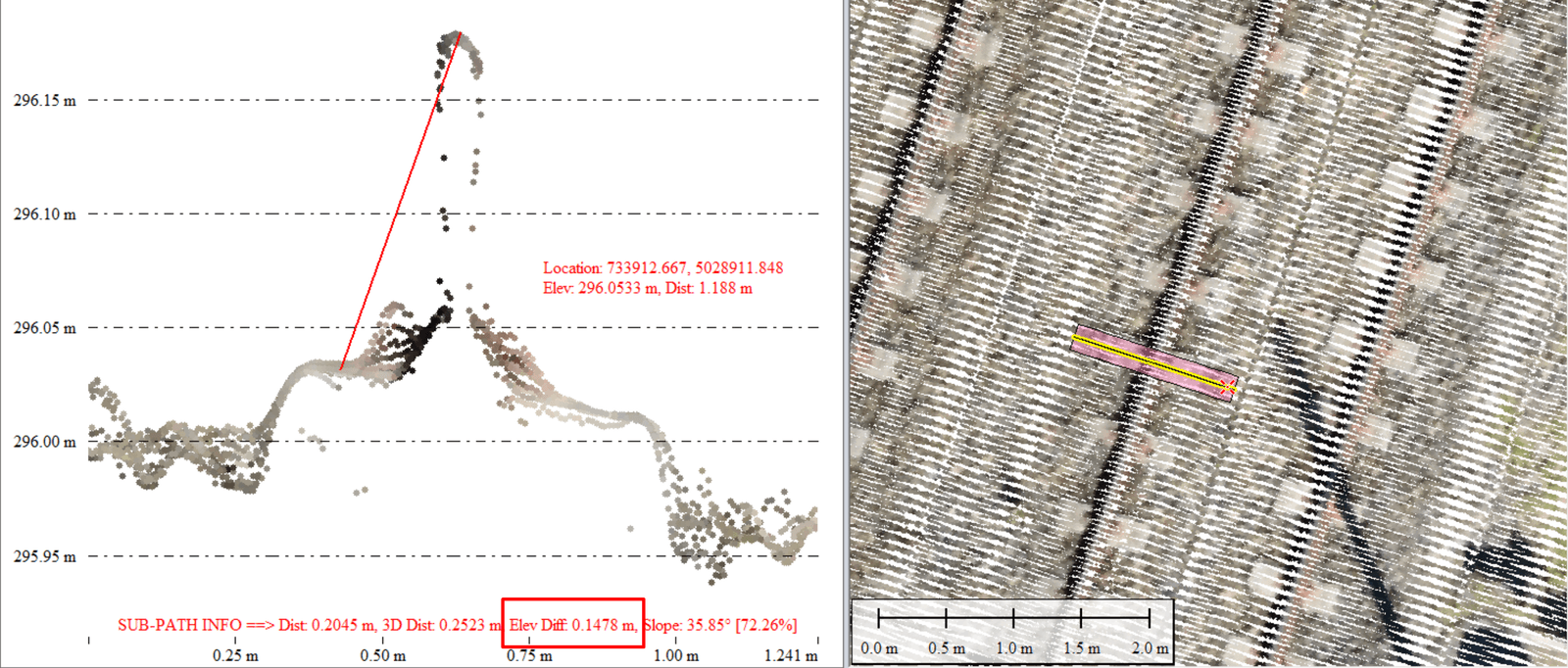
DJI Terra & Modify
Efter insamlingen bearbetas data i DJI Terra, där LiDAR- och bilddata samlas, kalibreras och processas. Terra erbjuder bland annat:
Klustermotor för snabbare bearbetning av stora dataset
Gaussian Splatting för fotorealistisk 3D-visualisering
Automatisk markklassning och generering av DEM, TIN och konturlinjer
Integrerade kvalitetsrapporter för att verifiera noggrannhet
I nästa steg används DJI Modify för redigering, brusreducering och klassificering av punktmoln. Där kan användaren smidigt ta bort störningar, justera ytor och förhandsgranska resultatet i realtid. Modify hanterar mycket stora filer och kan bearbeta punktmoln över 100 GB utan prestandaförlust.
RNG & Power Line Follow
För att öka säkerheten och precisionen använder systemet en laseravståndsmätare (RNG) med upp till 900 m mätområde. Funktionen Power Line Follow låter drönaren följa kraftledningar med 80°×80° synfält och upp till 300 m terrängföljning. Dessa verktyg används som stöd för att undvika hinder och bibehålla konstant avstånd.
DJI:s egna fälttester
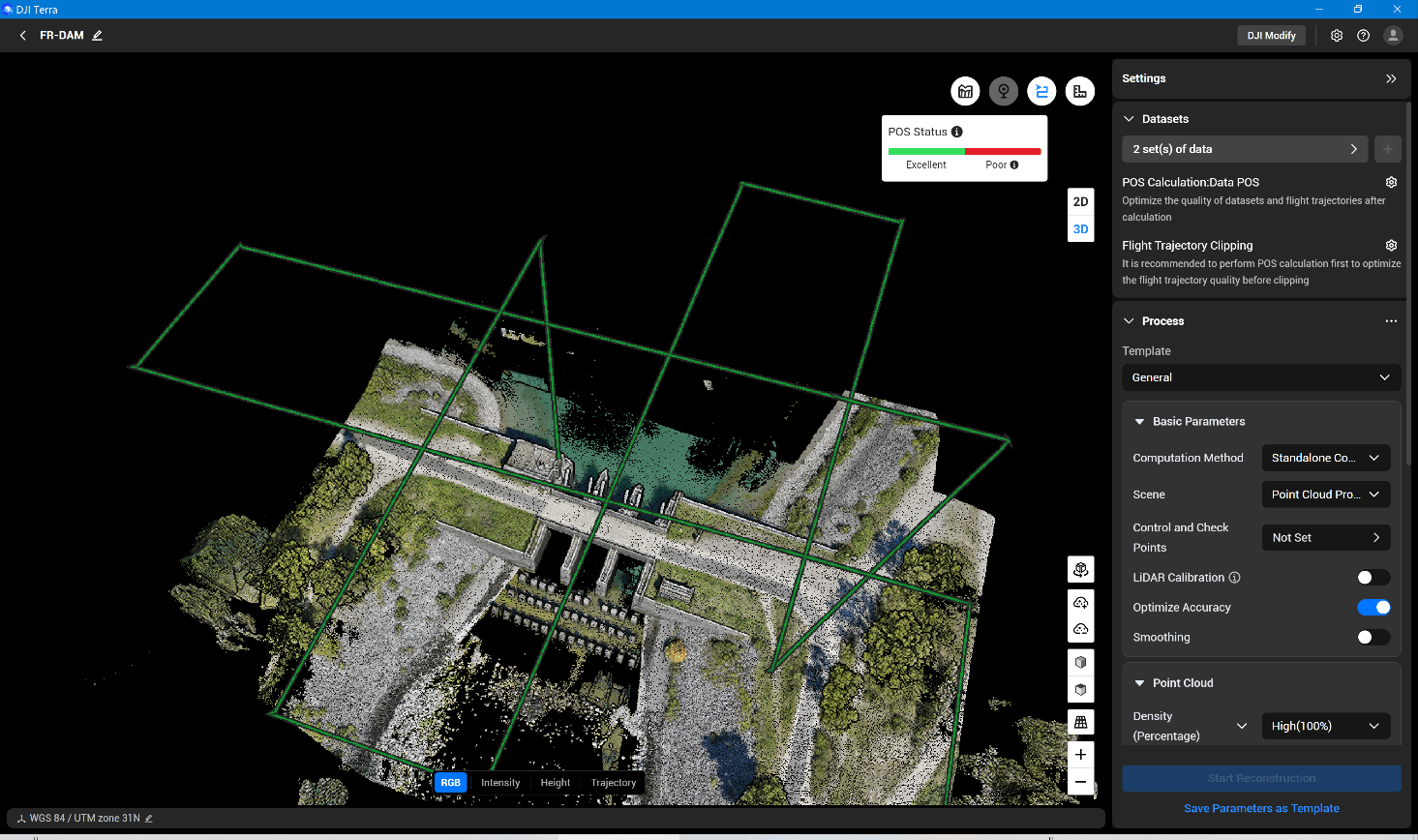
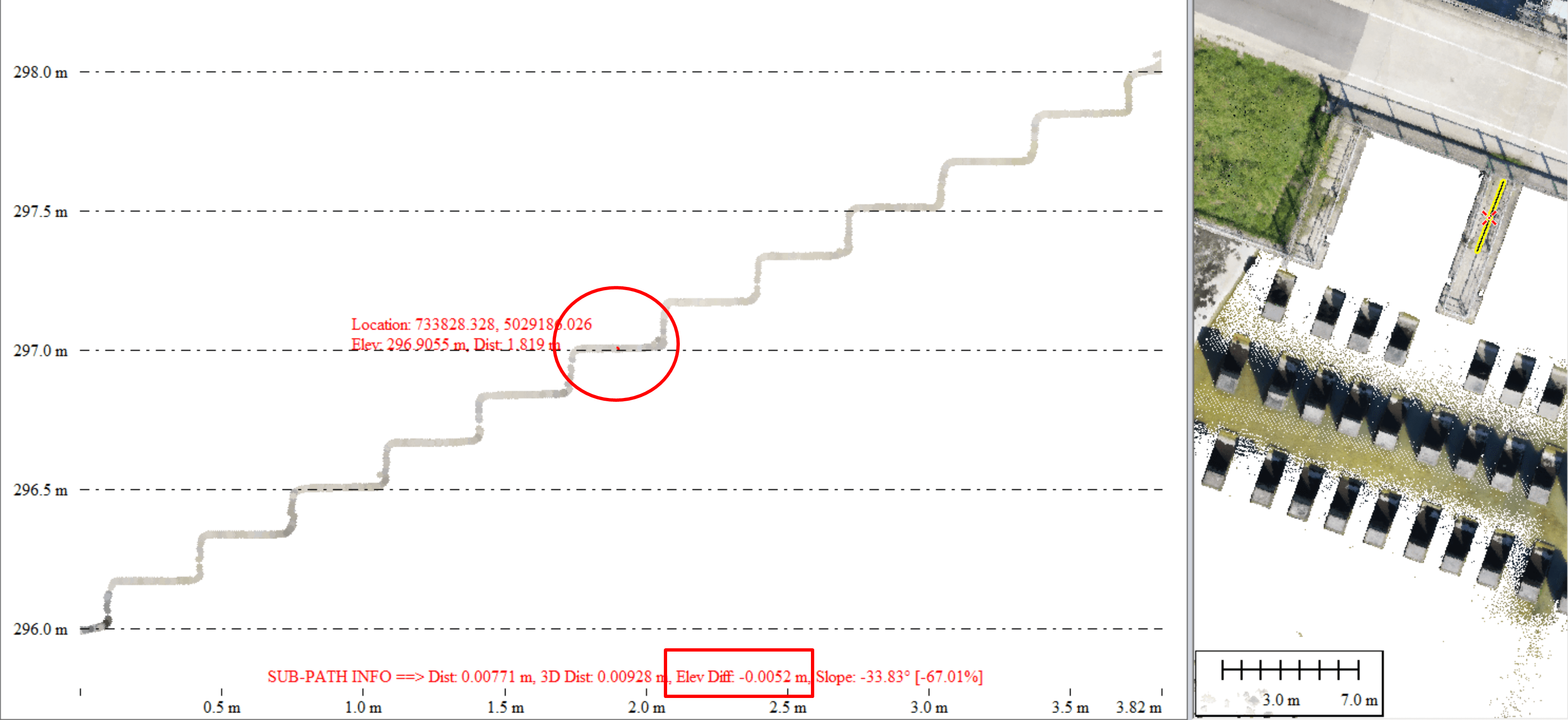
1. Järnvägsprojektet
I DJI:s tester över järnvägsspår i norra Frankrike användes Zenmuse L3 monterad på DJI M400. Syftet var att kartlägga spårens geometri och detektera deformationer och kontaktledningspositioner med hög detalj.
Projektparametrar:
Flyghöjd: 50 m
Hastighet: 6 m/s
Skanningsfrekvens: 2 MHz
Överlapp: 70 %
Datainsamling: 2 flygrutter, total längd 480 m, total flygtid 6 min
Resultat:
Punktmolnstäthet: ca 6800 pts/m²
Hård yta tjocklek: < 15 mm
Bearbetningstid: 10 min i DJI Terra
Punktmoln visade tydligt rälsprofil och kontaktledning, vilket gjorde dimensionsmätning enkel och exakt.
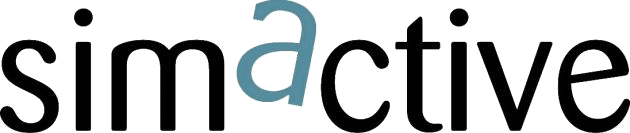
2. Dammprojektet
Vid ett separat test i sydöstra Frankrike genomfördes en dammskanning med samma sensor för att analysera strukturens geometri och ytrörelser.
Projektparametrar:
Flyghöjd: 50 m
Hastighet: 6 m/s
Skanningsfrekvens: 2 MHz
Överlapp: 60 %
Totalt: 2 korslagda flygrutter på 800 m (för full täckning)
Resultat:
Punktmolnstäthet: 6 468 pts/m² (DJI Terra) och 13 450 pts/m² (Global Mapper)
Punktmolnstjocklek på hårda ytor: < 10 mm
Dammen kunde rekonstrueras med full 3D-modellering och tydlig avgränsning av strukturelement
Bearbetning med Modify reducerade brus och möjliggjorde klassificering av väggar, terräng och vegetation
Plattform, mekanik & miljö
Kompatibilitet: Zenmuse L3 är utformad för DJI Matrice 400 och använder en ny gimbal med högre effektkapacitet. Sensorn väger cirka 1,6 kg och är optimerad för stabilitet vid precisionsmätning.
Skydd & miljötålighet: L3 är byggd med IP54-klassning, vilket innebär att den klarar kraftigt regn, damm, kyla ned till –25 °C och värme upp till +55 °C. Den robusta konstruktionen gör att systemet kan användas i hårda miljöer utan att tappa prestanda - oavsett om det är snö, lera eller stekande sol.
Gimbal & rörelseområde: Den 3-axliga gimbalen möjliggör flexibel skanning även på lutande eller vertikala ytor, med rörelseområde:
Pitch: -120° till +60°
Yaw: -80° till +80°
Roll: -90° till +60°
Avslutning
Kort sagt: Med laglig maxhöjd ≤ 120 m AGL är Zenmuse L3 det starkare valet för krävande mätuppdrag. Den mindre spotten (φ 41 mm), upp till 16 returer, bättre IMU‑precision och dual‑kamera ger tätare punktmoln, fler markträffar i skog och smidigare färgsättning än L2.
När L2 räcker: Enklare uppdrag i öppnare terräng och när du redan är låst till M300/M350 och accepterar ~4-5 cm som målprecision.