


































I denna artikel använder DJI, tillsammans med Cansel och Chris Nelson en Matrice 400 + Zenmuse L2 samt en Matrice 350 + Zenmuse L2 för att visa skillnader i arbetsflöde och effektivitet med det förbättrade M400-systemet, utrustat med samma L2-nyttolast.
Baserat på specifikationerna för båda systemen har M400 med L2 en flygtid på 59 minuter, vilket är 40 % längre jämfört med M350 eller M300. Denna skillnad ökar till 53 % när den jämförs med den uppskattade maximala effektiva flygtiden, som endast räknar den faktiska uppdragslängden.
När den uppskattade maximala effektiva flygtiden appliceras i uppdragsplaneringen får vi en tydlig jämförelse av täckning för operationsområdet vid olika flyghöjder. Totalt sett, tack vare längre effektiv flygtid, ger M400 över 80 % större täckning per flygning jämfört med M350 eller M300.
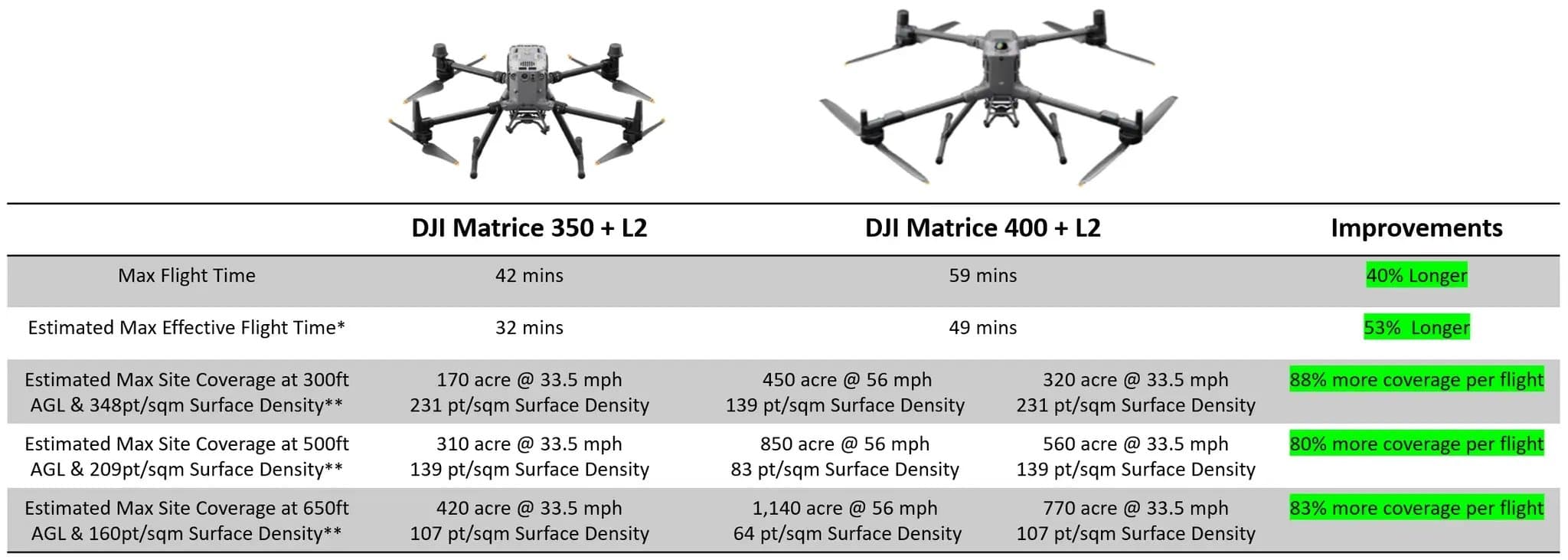
*Den maximala effektiva tiden avser endast uppdragslängden mellan den första och sista waypointen, och exkluderar andra delar såsom start, transport till första waypoint, återvändande till startpunkt samt landning. Dessa segment betraktas som icke-effektiv tid då de inte direkt bidrar till datainsamling. För jämförelse mellan olika system tillämpas ett standardavdrag på 10 minuter för att ta hänsyn till denna tid. Detta kan dock variera beroende på inställningar för Return-to-Home (RTH) samt påverkas av faktorer som vindförhållanden, terräng och väder.
**Uppdraget konfigurerades med 60 % sidöverlappning och 70 % frontöverlappning för LiDAR-datainsamling. Effektivitetsläge var avstängt för att prioritera datakvalitet, och IMU-kalibrering var aktiverad. Ingen höjdoptimering tillämpades. Flygområdet definierades med en fyrkantig gräns, men den faktiska polygonformen gjorde att IMU-kalibreringssekvensen kunde förlängas. Detta orsakades av behov av kalibrering mitt i rutten samt korrigeringar vid svängar. Observera att verklig prestanda ytterligare kan påverkas av miljöfaktorer såsom vind, terrängvariationer och väder.
Alla dessa jämförelser bygger på uppskattad prestanda från specifikationer och förutsätter optimala förhållanden.
Hur presterar systemen i verkliga scenarier?
För att ta reda på det genomfördes ett test där M350 + L2 och M400 + L2 jämfördes sida vid sida – samma dag, samma plats, samma väderförhållanden och liknande uppdragsparametrar.
Förberedelse
Ett omfattande testområde säkrades i Big Rock, Malibu, Kalifornien. Denna plats på 160 acres (ca 64,75 hektar) hade delvis förstörts under skogsbränderna i Kalifornien 2025. Bränderna, som ödelade över 250 000 acres (ca 99 192 hektar) i södra Kalifornien, var bland de mest förödande i delstatens moderna historia, drivna av extrem torka och starka Santa Ana-vindar. Flera byggnader inom testområdet förstördes, vilket skapade ett scenario för rekonstruktionsmätningar kopplade till försäkringsärenden och återuppbyggnad.
Platsen innehåller varierad terräng (branta sluttningar och platta ytor), olika vegetationstyper (helt utbrända till delvis påverkade områden) samt strukturella rester – en idealisk miljö för att jämföra drönarprestanda i katastrofåterhämtning. För detta test användes DJI Zenmuse L2 LiDAR-sensorn på båda drönarna för att samla in högupplöst markdata, vilket möjliggör digital terrängföljning på M350 och mer avancerad realtidsföljning på M400.
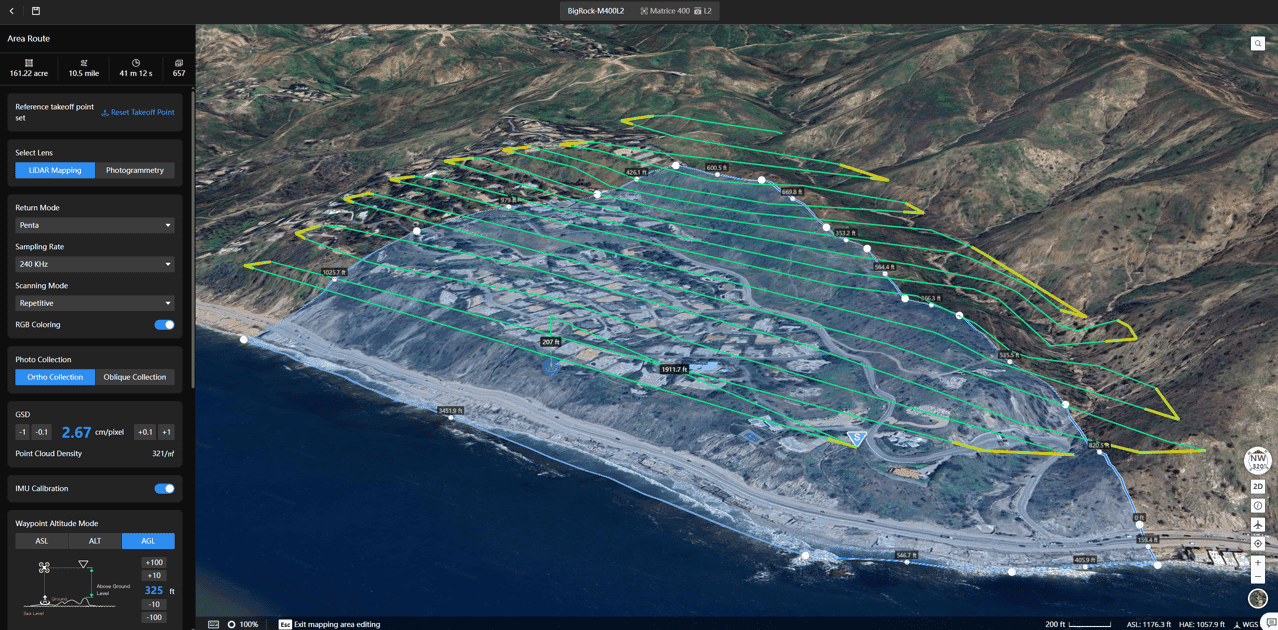
DJI FlightHub 2: Uppdragsplanering för M400 +L2
Uppdragsplanering
För Matrice 400 sker planeringsprocessen enligt följande:
Först definieras skanningsområdet. Detta granskas av mätteamet för att säkerställa att det täcker hela operationsytan. Polygonen kan även delas med markteamet för att öka säkerheten och visa var och när drönaren flyger.
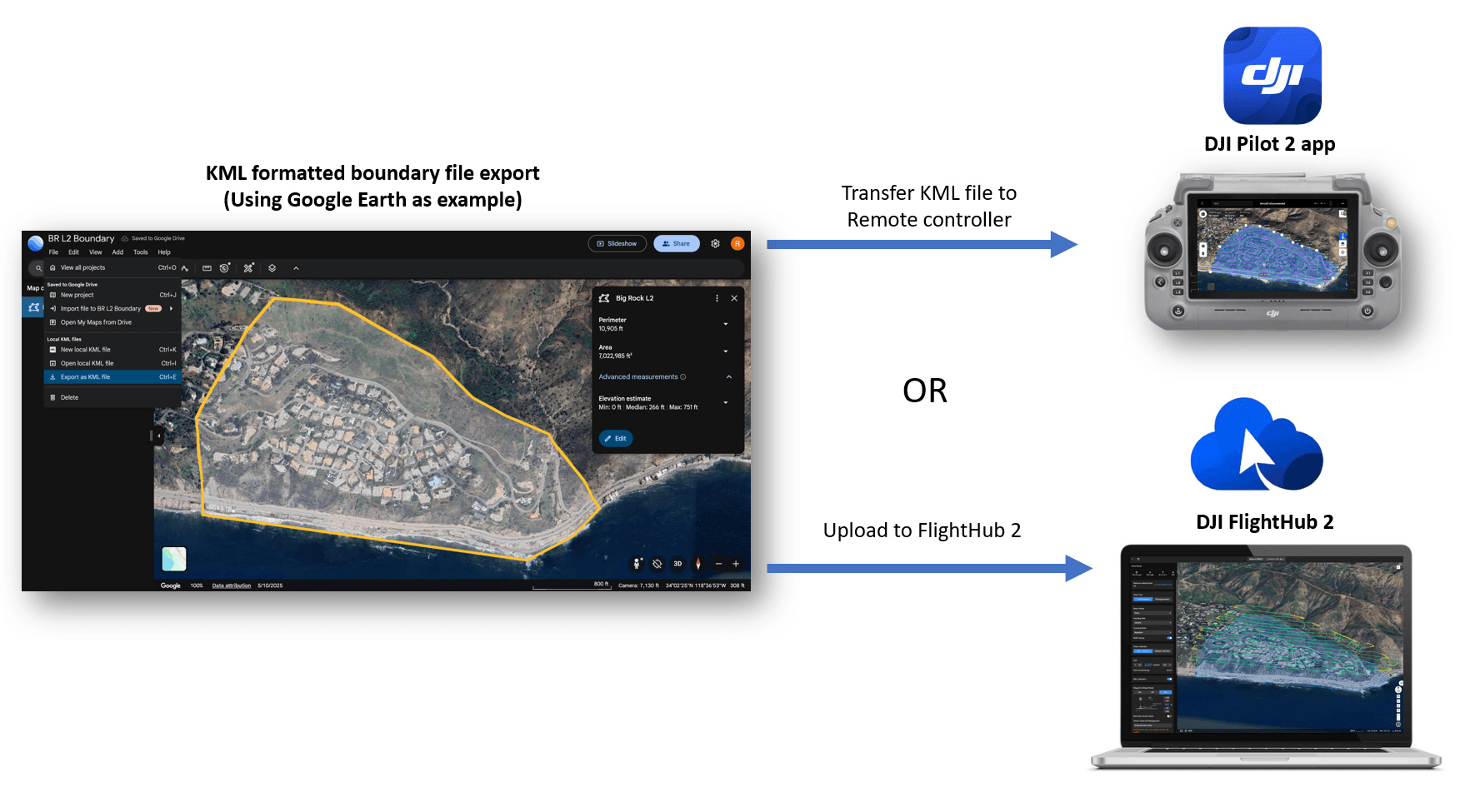
Arbetsflöde: Överför KML-formgränsfil till DJI Pilot 2-appen eller DJI FlightHub 2-appen
DJI FlightHub 2 användes för att skapa uppdrag för M400 som sedan synkroniserades till DJI Pilot 2-appen via molnsynk. Även om uppdragen hade kunnat planerats direkt i Pilot 2 på fjärrkontrollen, är det mer praktiskt att göra det på en dator. FlightHub 2 körs i webbläsare, vilket eliminerar behovet av fjärrkontrollen vid planeringen. Eftersom uppdragen lagras i molnet kan flera teammedlemmar komma åt och ändra dem.
Eftersom FlightHub 2 inte stödjer planering för M350, användes Pilot 2 för att modifiera ett redan synkat M400-uppdrag och ändra plattformen till M350, med bibehållna sensor- och flyginställningar.
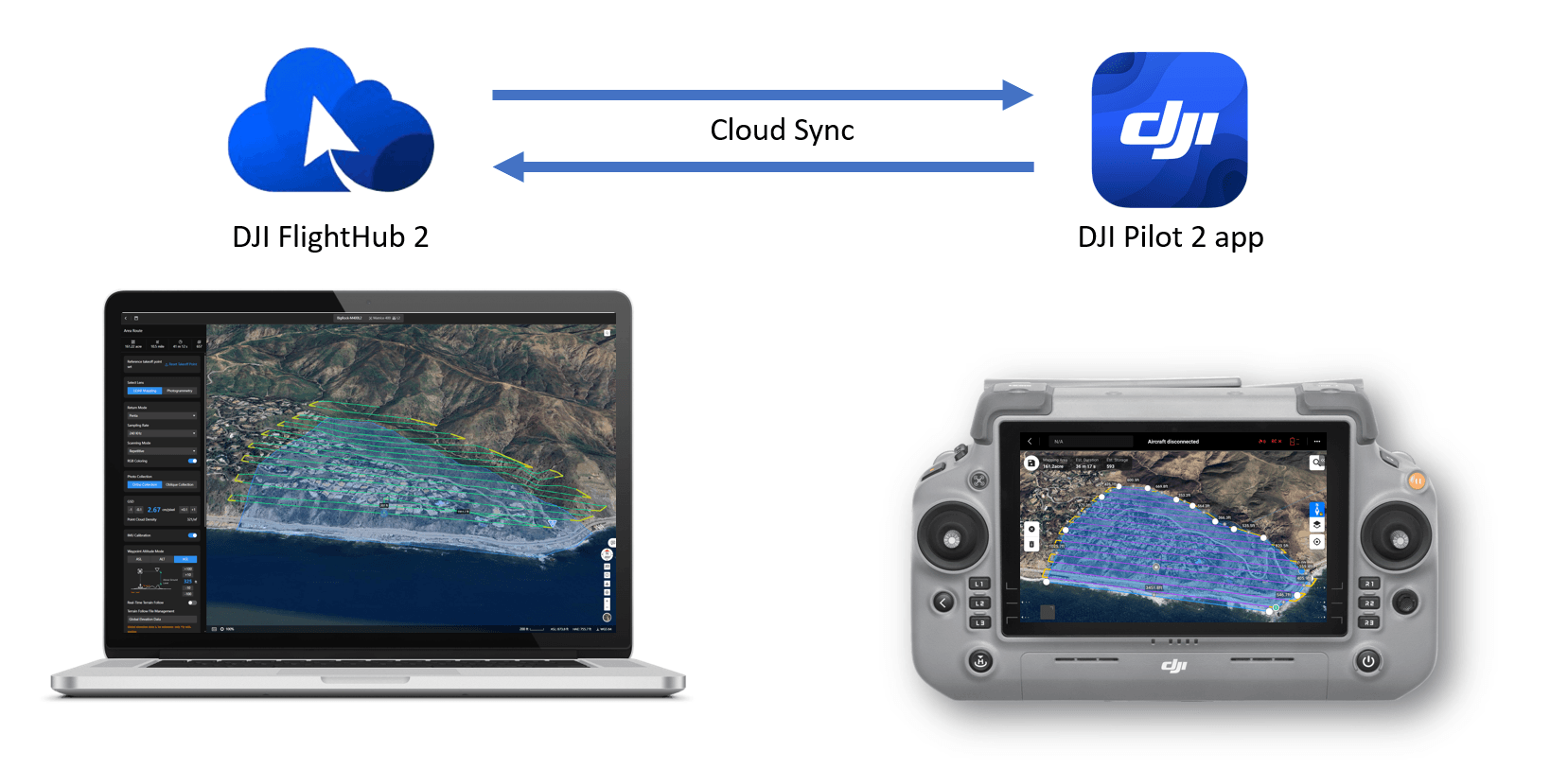
Arbetsflöde: Uppdragsfiler kan överföras och synkroniseras mellan molnet och den lokala fjärrkontrollen.
För en rättvis jämförelse mellan plattformarna användes identiska nyttolastinställningar, flyghöjd 325 fot AGL (ca 90 m över markhöjd), flyghastighet 20 mph (ca 32 km/h), överlappning (60 % sida, 70 % framåt) samt gränser.
Skillnad i terrängföljning:
Matrice 400 har realtidsföljning via sina avancerade visuella sensorer. Man anger bara höjden över marknivå i FlightHub 2 och aktiverar Real Time Terrain Follow. Systemet justerar sedan höjden automatiskt.
Matrice 350 saknar realtidsföljning och kräver att en DSM/DEM-modell importeras i Pilot 2. Detta kan göras antingen genom att importera lokala geotiff-filer eller genom att ladda ner ASTER GDEM V3-modellen (30 m upplösning). För att få mer exakt data bearbetade vi en DSM från M400 L2-fotogrammetri och importerade den i Pilot 2.
Det noterades att arbetsflödet med M400 är betydligt enklare. M350:s krav på DSM/DEM innebär merarbete och risk för fel (fel format, koordinatsystem, filstorlek).
Efter att båda uppdragen hade skapats sågs en omedelbar skillnad på 8 minuter i flygtid, motsvarande ungefär 18 % bättre effektivitet med M400 jämfört med M350. Eftersom båda flygningarna hade samma hastighet, höjd och uppdragsparametrar, antogs först att skillnaden berodde på olika beteenden i terrängföljningen. M400 använder realtids-terrängföljning, medan M350 beräknar höjdvariationer i förväg baserat på den importerade terrängmodellen.
Den initiala hypotesen var att M350:s förplanerade terrängföljningsrutt skulle representera de verkliga flygförhållandena mer korrekt, medan M400:s rutt kunde verka konstgjort kortare eftersom den inte tog hänsyn till faktiska höjdvariationer under planeringen. Misstankar fanns därför att skillnaden på 8 minuter skulle jämnas ut under M400:s flygning, när drönaren steg och sjönk i realtid som svar på terrängen.
Men resultaten visade motsatsen. I praktiken var det just M400:s realtids-terrängföljning som möjliggjorde den 16 % förbättringen i flygeffektivitet.
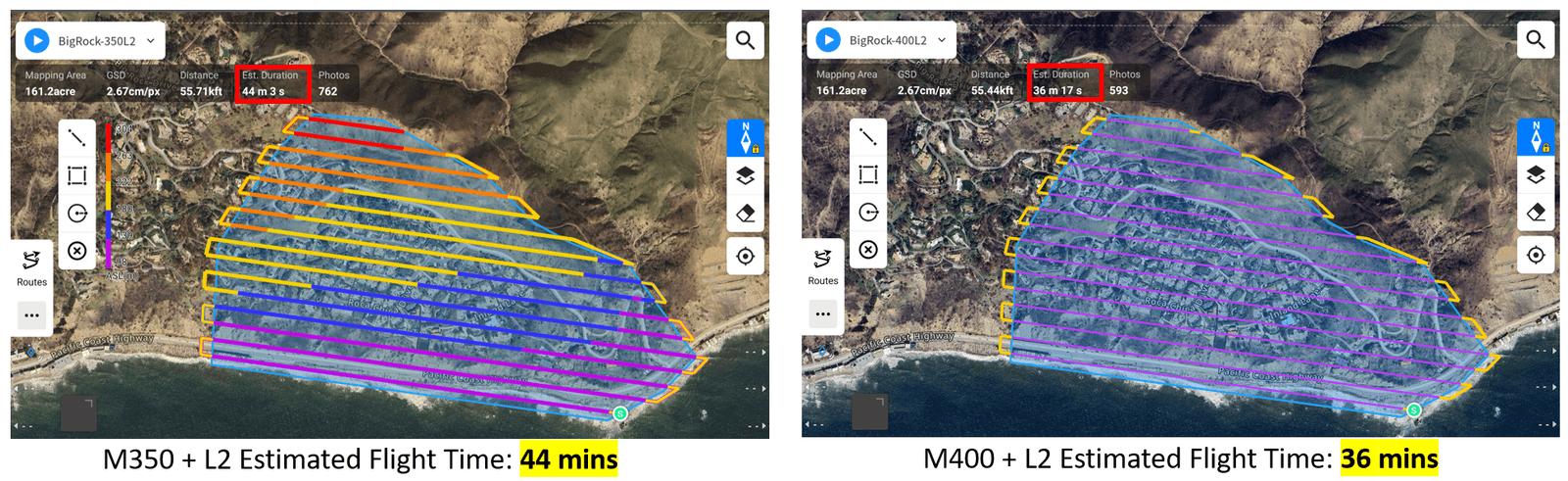
DJI Pilot 2: Estimerad flygtid
Datainsamling
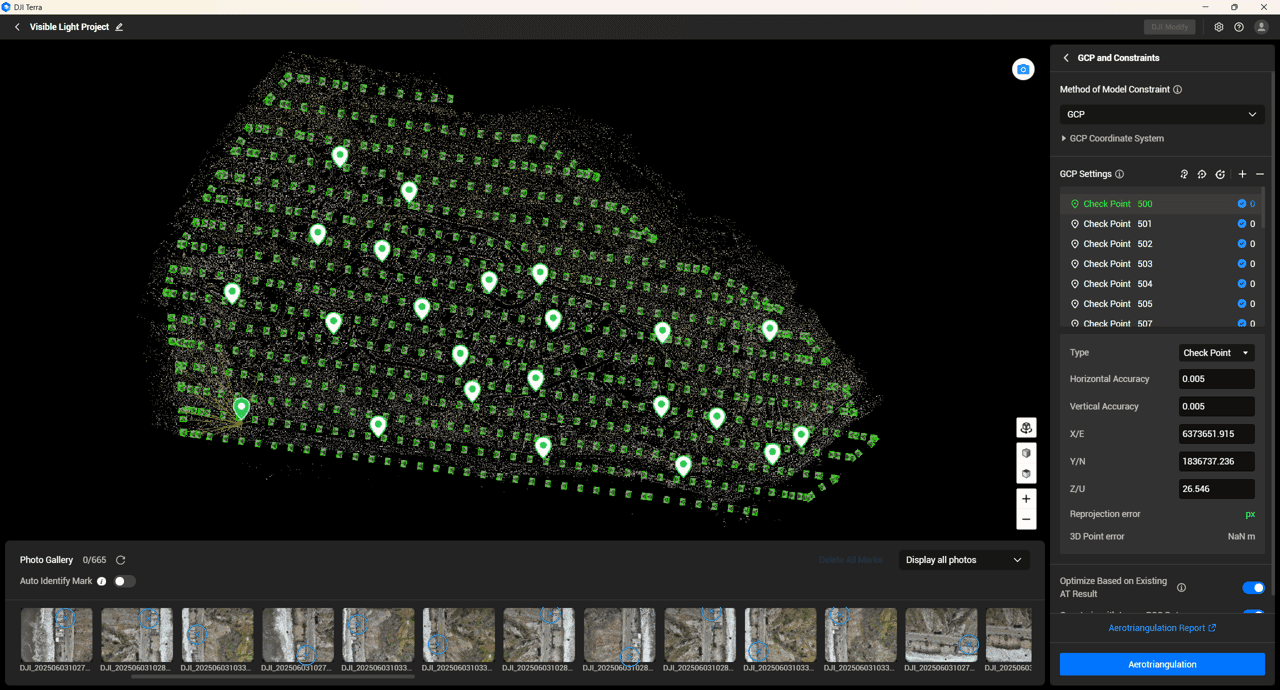
Mätningsteknikern satte först upp 23 kontrollpunkter över operationsplatsen med inspelade tillståndsprojektionskoordinater. Dessa punkter användes för att validera UAV-systemens precision och noggrannhet, och kunde även användas för att förbättra den absoluta noggrannheten i modellen. Varje kontrollpunkt placerades på en GCP-tavla med reflektiva markeringar för att enkelt kunna identifieras i punktmolnens reflektivitetsvyer.
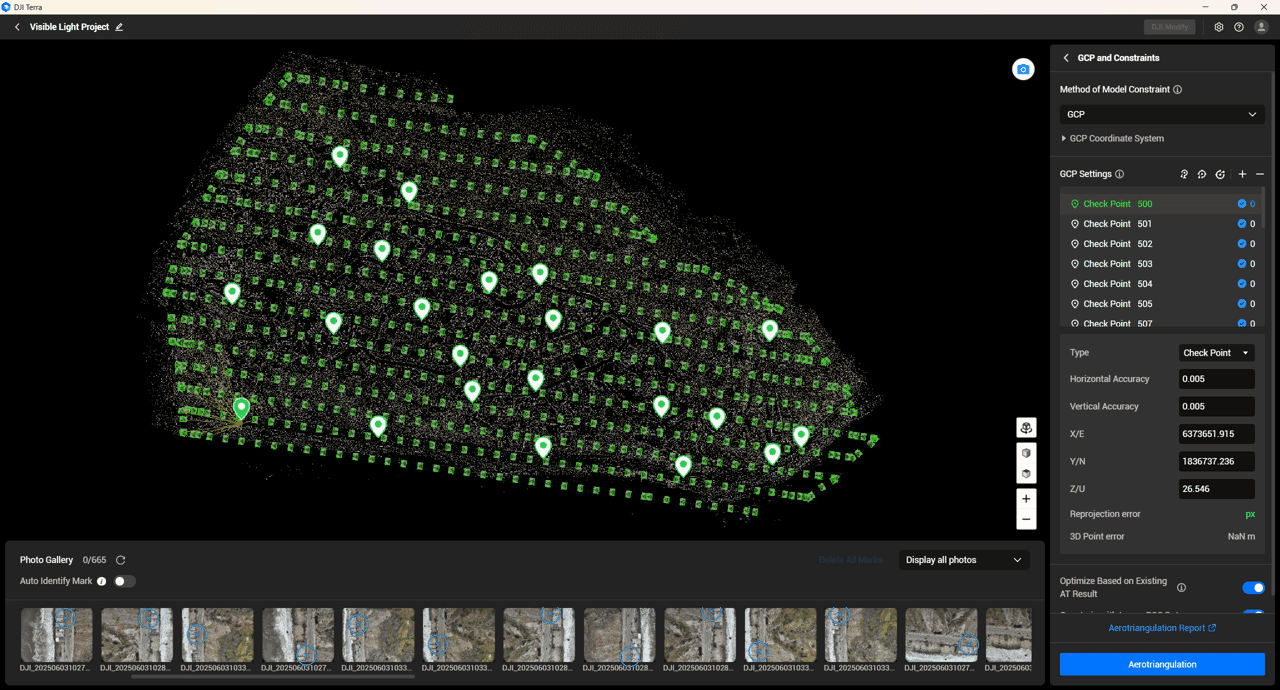
DJI D-RTK 3 användes som referensstation för korrigering under datainsamlingen. RTCM-data från basstationen skickades senare till OPUS för att erhålla en mer exakt lösning för D-RTK 3:s APC (Antenna Phase Center)-koordinater. Dessa förfinade koordinater användes sedan för att uppdatera den ursprungliga basstationens position i DJI Terra. Den uppdaterade positionen tillämpades därefter både i PPK-bearbetningen av M350 RTK med L2-data och i RTK-bearbetningen av M400 RTK med L2-data, vilket säkerställde förbättrad geolokaliseringsnoggrannhet i båda datasets.

- Centimeternoggrannhet
- Flera drönare stöd
- Relästation förlänger räckvidd
- Inbyggd IMU
- Flera dataöverföringslänkar
- Roverstation för kartläggning
Databehandling
Både M400- och M350-dataset bearbetades i DJI Terra och arbetsflödet var i stort sett identiskt för båda plattformarna. Eftersom M350 flögs utan RTK bearbetades dess data i DJI Terra via PPK-arbetsflödet. I praktiken finns dock ingen skillnad i bearbetningsstegen mellan de två dataset. När plattformarna används med nyttolaster som Zenmuse L2 eller P1 stöds både RTK- och PPK-arbetsflöden för efterbearbetning.
DJI Terra - M400 + L2 flight trajectory
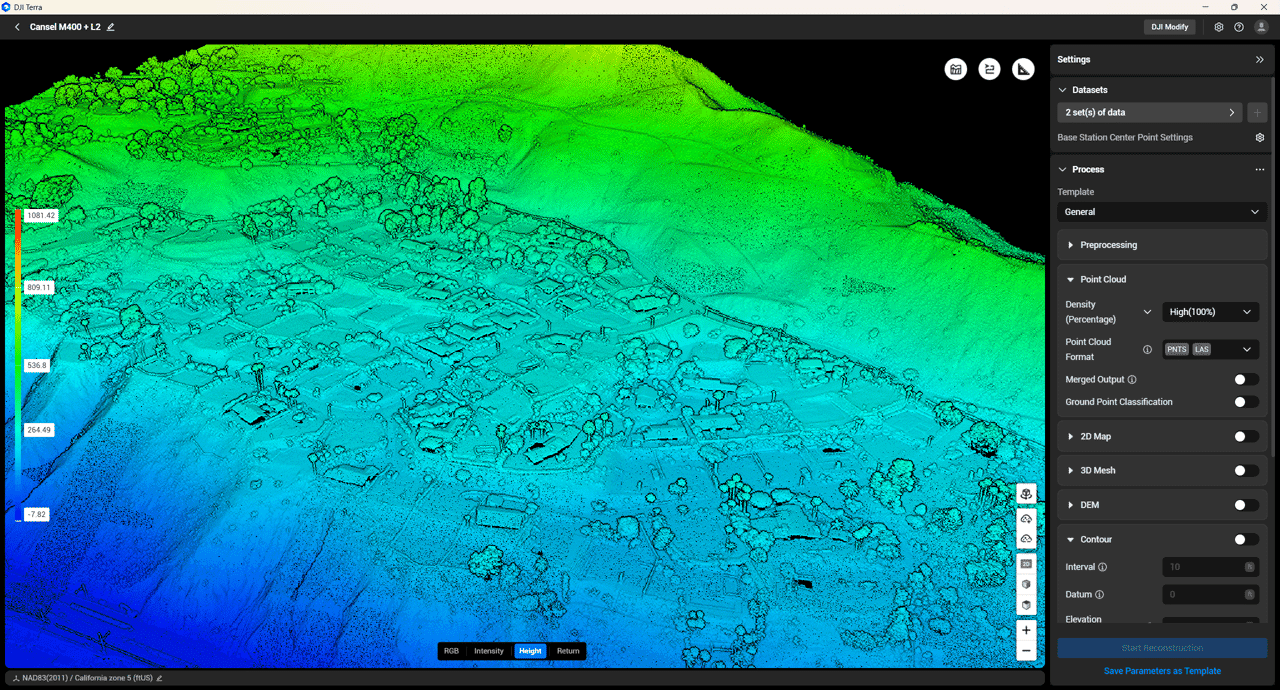
DJI Terra - M400 + L2 point-cloud processed
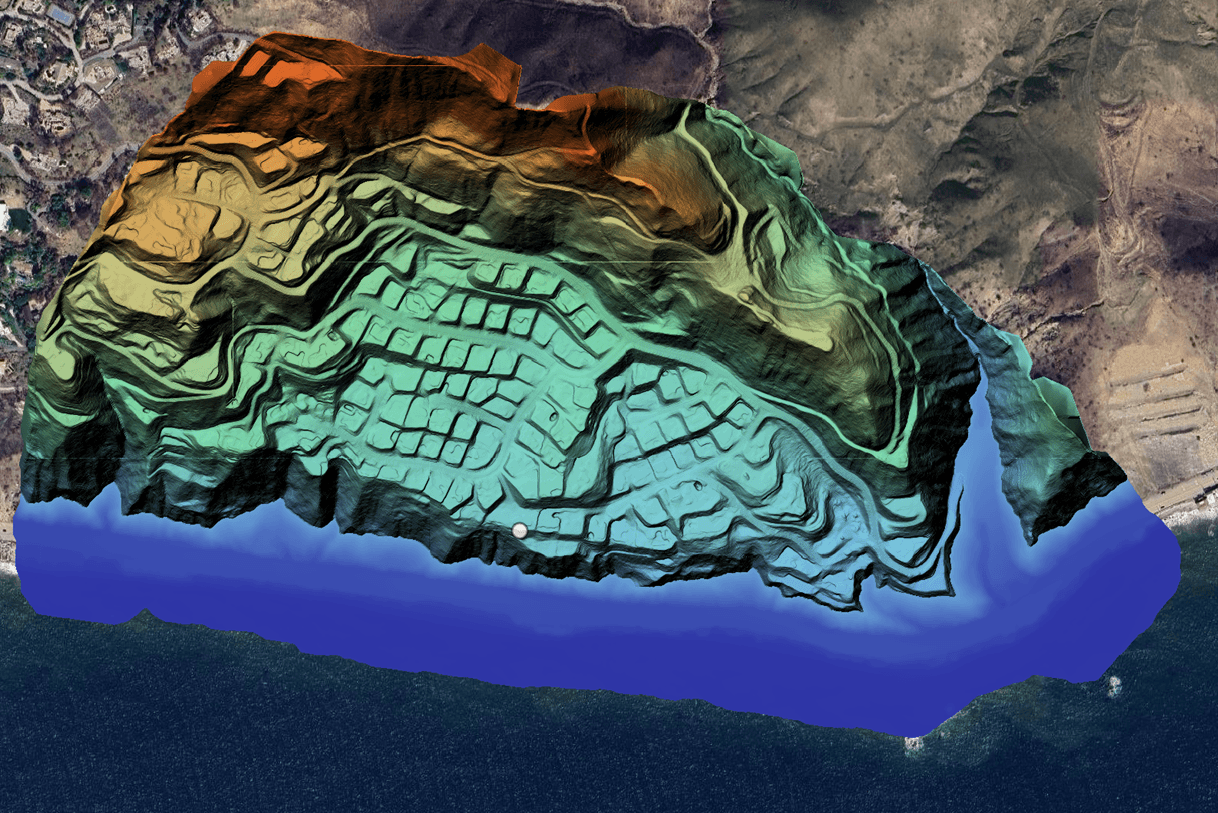
DJI Terra - M400 + L2 DSM processed
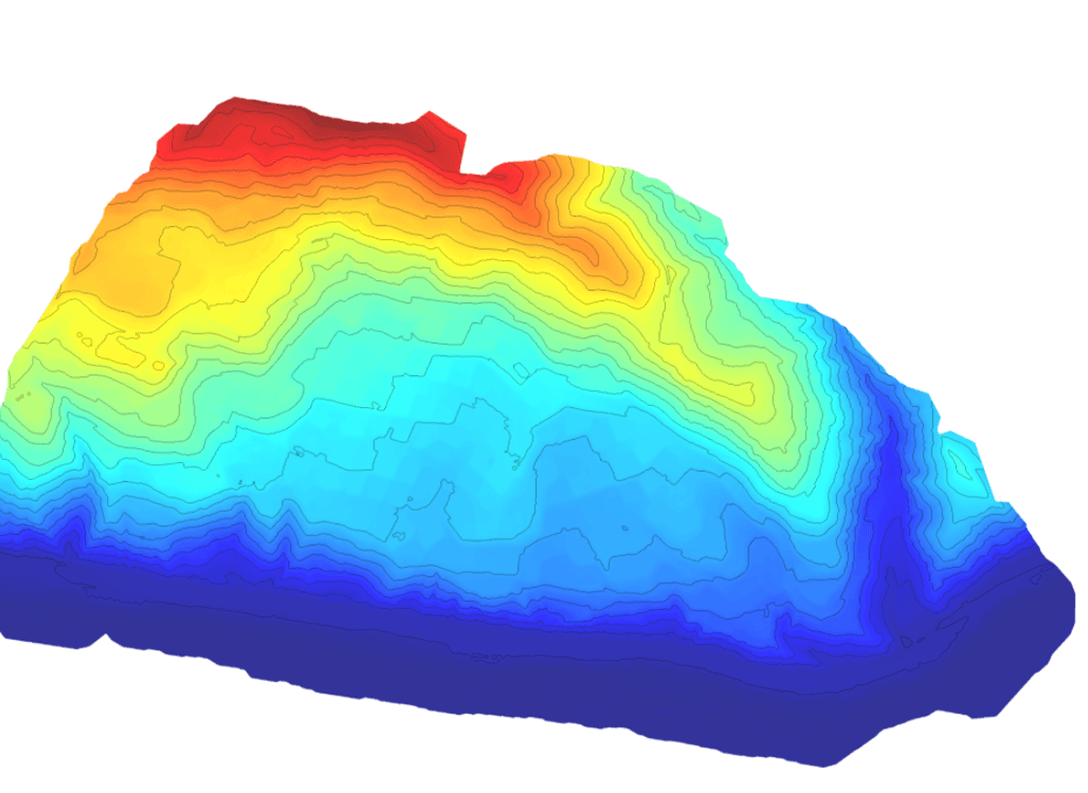
DJI Terra - M400 + L2 Contours processed
Effektivitetsjämförelse
I detta scenario testade vi ett område på 160 acres med både M400- och M350-plattformarna. I det verkliga testet såg vi att kraftiga vindförhållanden och betydande terrängvariationer orsakade frekventa höjdändringar under flygningarna. Dessa faktorer påverkade noggrannheten i våra uppskattningar av uppdragstiden.
För Matrice 350 | För Matrice 400 |
|---|---|
Genomfördes i två flygningar. Den totala effektiva uppdragstiden (från första till sista waypoint) var 45 minuter (Första flygningen: 24 minuter + Andra flygningen: 21 minuter). | Genomfördes i två flygningar. Den totala effektiva uppdragstiden (från första till sista waypoint) var 38 minuter (Första flygningen: 35 minuter + Andra flygningen: 3 minuter). |
Utmaningar med Matrice 350:
Föråldrade höjddata: Det är svårt att få tillgång till aktuella DSM/DEM-data för exakt terrängföljning med M350. Förplanerade uppdrag återspeglar ofta inte verkliga terrängförändringar, vilket kräver ständig uppmärksamhet från operatören.
Operativ komplexitet: Vid större kartläggningsområden innebär M350:s kortare flygtid fler batteribyten, vilket ökar RTK-återanslutningsfördröjningar och skapar fler riskmoment för mänskliga fel.

- Drönare utgått, se M400 istället
- Guldpaket med extra utrustning
- DJI Matrice 350-drönare
- Zenmuse L2-LiDAR
- Stabil och säker flygning
- Hög precision
- Överlägsen penetration
Förbättringar med Matrice 400:
Realtids-terrängföljning: M400 erbjuder realtidsföljning både vid kartläggningsuppdrag och manuella flygningar. Operatören anger enkelt önskad höjd över markytan, och systemet håller automatiskt en jämn höjd över varierande terräng. Detta säkerställer jämn Ground Sampling Distance (GSD) och konsekvent LiDAR-punktdensitet över hela området.
Förlängd flygeffektivitet: Den längre effektiva flygtiden gör att M400 täcker större ytor per uppdrag. Detta minskar antalet batteribyten, effektiviserar fältarbetet och förbättrar den totala datainsamlingen.
Förbättrad datakvalitet: Tack vare realtidsföljning och färre avbrott levererar M400 mer konsekventa dataset av högre kvalitet, med mindre behov av korrigering i efterhand.

- Komplett drönarpaket
- 3 st drönarbatterier
- Hög precision med L2 LiDAR
- BS100 laddstation
- 1 års DJI Care Enterprise Plus ingår (täckningsgräns 8 800 EUR)
Slutsats
Detta jämförelsetest genomfördes av DJI i samarbete med Cansel och Chris Nelson, PLS på CA 5 Survey. Testet visar tydligt att M400-plattformen erbjuder en effektivitetsfördel jämfört med M350 vid LiDAR-kartläggning av medelstora områden.
Fördelarna bygger på tre centrala förbättringar: längre flygtid, avancerad realtids-terrängföljning och enklare arbetsflöde. Dessa faktorer resulterar i betydligt högre täckning per flygning, färre batteribyten – särskilt på större områden – och samtidigt bibehållen datakvalitet.
Under identiska testförhållanden uppnådde M400 en 16 % förbättring i total flygeffektivitet samt cirka 39 % större täckning per enskild flygning jämfört med M350.
Parameter | DJI Matrice 350 + L2 | DJI Matrice 400 + L2 | Förbättringar |
|---|---|---|---|
Beräknad effektiv flygtid (Max tillåten hastighet) | 36 min @ 33,5 mph 192 pt/sqm Surface Density | 19 min @ 56 mph 115 pt/sqm Surface Density | 47% effektivare |
Beräknad effektiv flygtid (20 mph) | 44 min @ 20 mph 321 pt/sqm Surface Density | 36 min @ 20 mph 321 pt/sqm Surface Density | 18% effektivare |
Faktisk effektiv flygtid (20 mph) | 45 min @ 20 mph 321 pt/sqm Surface Density | 38 min @ 20 mph 321 pt/sqm Surface Density | 16% effektivare |
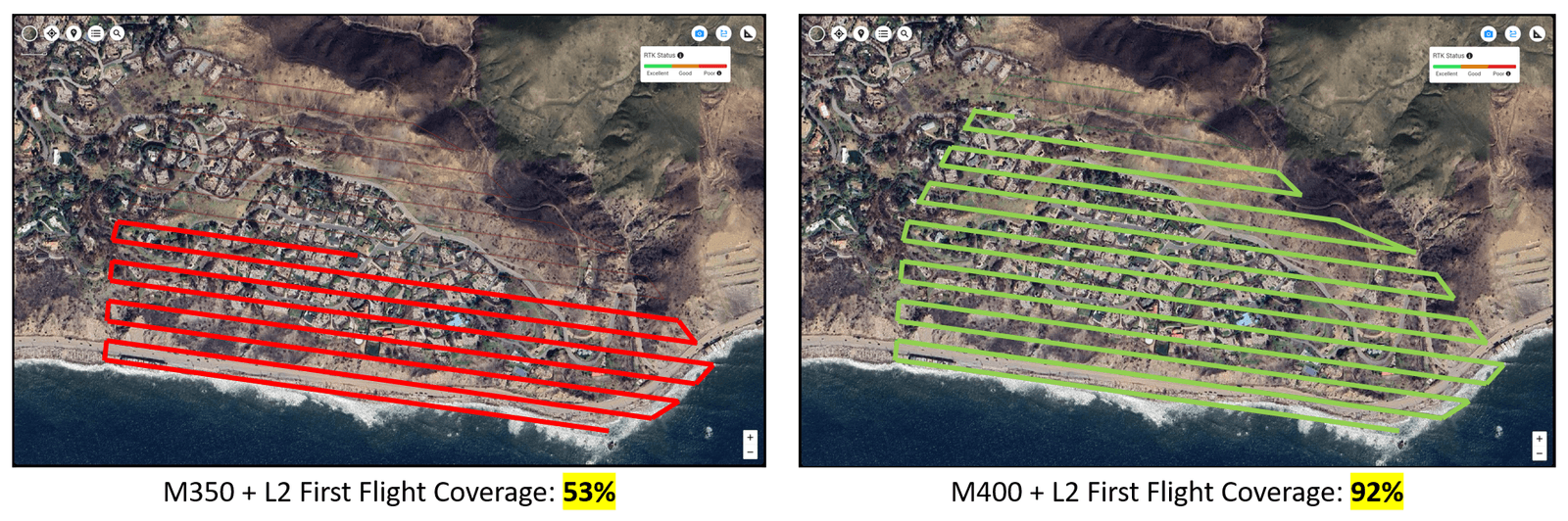
Täckning vid första flygning (20 mph) | 53% | 92% | 39% mer täckning |